
先天性肛门直肠畸形(anorectal malformations,ARM)发病率位于小儿消化道畸形首位,是小儿外科领域极具代表性的病种。手术是ARM唯一的治疗方法,过去几十年来,手术方式经历了从开放手术到微创手术的巨大转变。传统腹腔镜设备在操作精确度、维度上存在局限,未能满足外科医生对于更高技术水平操作的追求。机器人辅助手术以操作灵活、高清三维图像为特点,最初应用于成人外科,其后逐渐扩展到小儿外科领域,现已开始应用于小儿ARM的治疗。本文结合国内外文献报道,系统性回顾和概述机器人手术系统在ARM治疗中的应用进展及展望。


2022年版权归临床小儿外科杂志社所有。未经授权,不得转载、摘编本刊文章,不得使用本刊的版式设计。除非特别声明,本刊刊出的所有文章不代表临床小儿外科杂志社和本刊编委会的观点。
肛门直肠畸形(anorectal malformations,ARM)是指胚胎远端后肠畸形,又称肛门闭锁,是新生儿常见的肠道发育畸形之一,发病率无种族差异,为1∶5 000~1∶2 000,男性患者人数约为女性的3倍[1]。ARM的临床表现具有较明显的个体差异,包括容易治疗且预后良好的肛膜闭锁,以及复杂且治疗困难、长期预后欠佳的一穴肛畸形(cloacal malformation)。1988年Wingspread将ARM分为高位畸形、中位畸形和低位畸形,并针对泄殖腔畸形和罕见畸形建立了特殊分类,这对手术方式的选择有一定的指导价值[2]。新的国际Kriekenbeck分型依据直肠瘘管位置和发生频率,对于手术路径和方法的选择更具有指导意义。对于复杂ARM的手术治疗方法包括腹会阴肛门成型术(Stephens手术)、后矢状入路肛门直肠成形术(posterior sagittal anorectoplasty,PSARP,又称Peña手术)、腹腔镜辅助手术(laparoscopic assisted anorectal pull-through,LAARP)、机器人辅助手术(robotic-assisted anorectal pull-through,RAARP)[3,4,5,6,7,8,9,10,11,12]。文献资料显示,微创手术(包括LAARP和RAARP)对横纹肌复合体及周围神经血管组织的损伤小,患儿恢复快,术后排便功能好。本文回顾微创手术在ARM治疗中的应用现状与进展,并对RAARP的未来进行展望。
RAARP与LAARP在手术技术和步骤上相同,但不同医院和医师间稍有差别,均采用3臂技术,脐部放12 mm或8 mm穿刺器,置入30°机器人镜头。右上腹、左上腹各放置1个8 mm机器人套管(图1A),可根据前期结肠造口位置调整。CO2气腹压力为6~10 mmHg(1 mmHg=0.133 kPa),流速2.5~4.5 L/min,左下腹穿入4号针头作为排烟孔。患儿取头低足高位。左侧放入Maryland抓钳,右侧放入单极电钩。用电钩切开腹膜反折处的直肠浆膜层,按照Georgeso技术向尾侧游离直肠,变细处即为瘘管进入尿道或阴道壁的位置,于此处切断瘘管(图1B),应用膀胱镜指引则更为确切。瘘口使用5-0吸收线进行"8字"缝合(图1C)。为了方便瘘管的游离和缝合,可将膀胱颈或子宫颈悬吊于腹壁以增加暴露。分开盆底脂肪组织,显示横纹肌复合体中的耻骨直肠肌腹。于会阴部电刺激寻找肌肉收缩中心,纵行切开皮肤1.2~1.4 cm,再次刺激肌肉时可在盆底两侧见到收缩的耻骨直肠肌肌腹。血管钳钝性游离到达盆底,镜头监视盆底横纹肌复合体中心,扩张隧道,将直肠从隧道中拖出(图1D),注意保持肠管不要扭转。肠壁浆肌层与骶前筋膜左、右各缝合一针固定,减轻直肠脱垂。5-0可吸收线缝合直肠与会阴部皮肤,形成新的肛门口。
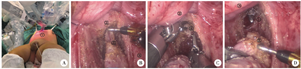
注 A:腹腔镜穿刺器Trocar布置图,①12 mm镜头,②8 mm单极电钩,③8 mm Maryland抓钳;B:解剖并离断瘘管,①切开的瘘管盲端,②膀胱颈,③输尿管;C:缝合瘘管,①瘘管开口,②膀胱;D:拖出肠管,①耻骨直肠肌肌腹,②直肠盲端,③膀胱
RAARP的适应证与LAARP相似,包括男童的直肠膀胱瘘和前列腺尿道瘘、女童的直肠阴道瘘和长通道一穴肛[8,13]。LAARP治疗直肠球部尿道瘘目前存在争议,治疗直肠会阴瘘、直肠前庭瘘以及无瘘患儿虽有文献报道,但并发症多,疗效不如PSARP[6,14]。RAARP治疗直肠球部尿道瘘,临床证明安全、可行,在瘘管的解剖和闭合上具有优势[12]。手术禁忌证主要是既往有手术史导致腹腔严重粘连和不能承受气腹者。尽管机器人手术实行准入制,提高了技术门槛,但禁忌证与腹腔镜手术没有差异。
2010—2022年,RAARP手术开展已12年,共有6篇文献报道了29例ARM患儿[7,8,9,10,11,12]。年龄从4个月至17岁,最长随访时间36个月。2010年,来自沙特阿拉伯的Alqahtani等[7]首次对该医院完成的小儿达芬奇机器人手术进行评估,其中4例肛门闭锁患儿顺利接受机器人手术治疗,术后随访29个月,未出现并发症;2011年,他们再次报道了5例合并直肠尿道瘘的ARM机器人手术,技术原则与Georgeson技术一致,手术年龄4~11个月,手术过程顺利,平均手术时间213.6 min;随访6~36个月,期间有1例附睾睾丸炎合并尿道憩室、1例出现直肠黏膜脱垂、1例出现污便,均经保守治疗后好转。机器人辅助手术在瘘管解剖和缝合方面具有明显优势,能够在盆腔狭小空间内完成瘘管的精准分离与修补[8]。2016年Ruiz等[9]报道了1例5月龄患儿机器人辅助直肠尿道瘘手术,随访期间患儿恢复良好,未出现并发症。此术式较LAARP可更好地呈现横纹肌复合体结构,将直肠精准置于肌肉复合体中心。2019年,美国Phillips等[10]报道了1例20月龄的Mckusick-Kaufmen综合征合并尿生殖窦和ARM的患儿,应用机器人手术系统成功完成了该例复杂手术,用时350 min,随访2年,该患儿可以自行控制排便、排尿。术中清晰解剖直肠、阴道,为病情复杂患者进行多专科合作手术提供了一定条件。2022年,美国Tirrell等[11]完成1例17岁先天性前列腺直肠尿道瘘患儿的机器人手术,术后随访9个月,肛门愈合良好,有良好的排便和排尿功能,体现了机器人系统在大龄儿童ARM手术中的优势。
2018年,本团队报道了9例ARM机器人手术,是国内第一篇关于机器人辅助肛门成形术的中文文献报道[13];并于2022年在Surgical Endoscopy上报道17例ARM机器人手术,也是迄今样本量最大的病例报道;手术年龄(4.9±1.9)个月,经过11.6个月随访,13例恢复了正常排便功能,4例出现轻度便秘或大便失禁,2例合并肛门狭窄[12]。我们认为机器人系统的高清三维图像、灵活的仿真手腕机械手和震颤滤过功能,特别适用于狭小的盆腔深处直肠周围筋膜、瘘管、括约肌、神经血管等组织结构的识别和精细解剖,有利于减少盆底神经和括约肌系统的损伤,是肛门成形术中保护神经和括约肌的理想方法。
先天性肛门闭锁和巨结肠症是小儿肛肠外科常见的两种疾病,手术均涉及到盆腔直肠的解剖。在成人直肠癌和前列腺疾病中,机器人手术比腹腔镜手术、开放手术获得了更好的盆底神经和肌肉保护作用[15,16]。受限于年龄和随访时间,临床很难评估小儿接受机器人手术后涉及盆底神经、肌肉及相关组织的排便、排尿和性功能,但畸形的精准矫治、正常组织的最大保护是获得良好长期预后的重要保障。RAARP的学习曲线与机器人巨结肠手术可以相互转移,经5~10例手术后,可显著减少机器人平台设置时间和总操作时间。从LAARP的发展经历来看,RAARP推广速度较慢,机器人手术平台在儿童专科医院的普及率不高是原因之一。随着机器人技术的进步、装机数量的增加以及医生应用的日益熟练,未来应用范围和病例数会逐年增多。
目前未见直接比较腹腔镜与机器人辅助肛门成形术优缺点的文献,但多篇报道提到机器人手术平台固有的技术特点,在估计术中失血量、住院时间和并发症等方面,RAARP优于LAARP[8,9,11,12]。Rintala和Pakarinen[15]最近发表的一篇综述探讨了PSARP治疗ARM合并直肠尿道瘘患者的长期和短期疗效,发现只有35%的患儿具有长期完好的排便功能。Albassam等[8]复习文献资料发现LAARP的疗效至少与PSARP相同,而基于临床数据,RAARP的随访结果优于LAARP。Ruiz等[9]认为RAARP的高清3D、放大10~15倍成像更易于显示和闭合尿道远端的瘘管;而LAARP闭合瘘管较为困难,因其器械僵硬,同时需要娴熟的腔镜操作技能。其次是RAARP的灵活性,可精准地将直肠置于盆底耻骨直肠肌的中央,这对实现排便控制非常重要。30°光学系统腹腔镜检查可以看到横纹肌复合体的位置,但常规器械无法对其进行正确解剖。机器人手术具有仿真手腕机械臂,能够以精确的角度解剖肌肉复合体,将直肠导入到理想位置并进行吻合。另外,RAARP稳定性高,操作者眼手协调性好,可在狭小盆腔空间内减少操作区域邻近血管、泌尿生殖神经等发生医源性损伤的风险。然而,ARMs是外科中为数不多的短期内疗效不显著的疾病之一。尽管如此,在发育不良或畸形背景下,解剖结构与正常儿差异较大,机器人手术精准解剖与分离,能够最大限度保留这些功能不全的神经、肌肉和血管,减少或避免试错机会,是预期长期良好功能的重要保障[14]。
除此以外,机器人手术可以减少外科医生的精神和体力消耗,带来更舒适的体验,利于控制手术整体质量;三维高清视野栩栩如生、如临其境,当移动机器人手腕时,有7个自由度,各有90°转弯,便于完成最复杂或最困难的任务[7]。机器人手术还可以节约人力成本,减少助手的数量,特别适合于下班后或周末的手术[16]。
RAARP最明显的不足是费用相对昂贵,增加手术成本,包括开机费、器械定期更新费和保护套等费用[13]。另一个不足是政府决策层面对机器人手术系统的限购政策,让儿外科医生接触机器人平台的机会减少。技术层面上,现阶段临床上应用的基于成人设计的器械对新生儿、婴儿而言体积太大,相对于LAARP中3 mm器械,瘢痕会更为明显。目前8.5 mm的3D视野镜头已经安装在新一代机器人系统上,期待未来更具灵活性的内腕直径5 mm或3 mm手术器械上市[17]。婴儿腹壁的体表面积小,减少穿刺器之间的距离需要术者操作机器臂能力的提升,这种技能可以从小儿腹腔镜手术中获得。除此以外,机器人平台没有提供触觉反馈功能,外科医生主要通过视觉来源感受机械臂触觉大小,弥补触觉感知的不足。通过观察手术外科结的几何形状和组织张力,转移到触觉上施以恰当的张力,打好外科结。
RAARP另一明显不足是手术时间长,随之带来的是麻醉时间和伤口暴露时间延长,对患儿身体和切口的不利影响则需要医学科学和医学经济学的深入评估。手术时间包括手术前时间(从进入手术室到操作机器人工作臂)、手术时间(从操作机器人臂到最后一个切口缝合)和手术后时间(从完成最后的缝合到病人离开手术室)。RAARP与LAARP的差别主要在手术前时间,机器人设置和对接是导致手术前时间延长的主要原因,一般需要20 min左右[11,12]。
LAARP治疗高位瘘管(如直肠膀胱瘘、前列腺部尿道瘘以及直肠阴道瘘)患儿具有明显的优势[18,19]。对于低位瘘管如直肠球部尿道瘘和会阴瘘、直肠前庭瘘,LAARP需更广泛的游离,可能损伤尿道或阴道,或者残留尿道憩室,许多专家推荐首选PSARP[20,21]。在腹腔镜手术时代,虽然ARM合并直肠球部尿道瘘手术具有挑战性,但长期随访结果与PSARP相似[21]。在机器人手术时代,ARM合并直肠球部尿道瘘的手术变得更加容易[8,12]。同时机器人系统可结合膀胱镜、集合的荧光系统,降低瘘管残留的风险[11]。
目前还没有RAARP治疗ARM合并直肠前庭瘘、直肠会阴瘘或无瘘患儿的研究报道,从腹腔镜手术的经验来看,这是未来机器人手术值得尝试的领域[18,20]。
近年来,腹腔镜辅助一穴肛畸形手术获得长足的进展。对于长通道一穴肛(共同管长度>3 cm)患儿,早年认为腹腔镜手术对直肠近端的游离有帮助,而对阴道和尿道的处理无能为力,需要结合后矢状入路的阴道和尿道整体下移完成手术[22]。随着对病理解剖结构认识的深入和腔镜技术的进步,腹腔镜手术不仅可以游离直肠、阴道,还能分离尿生殖膈,纵向分割共同通道的侧壁,重建尿道和阴道等[23,24]。
机器人辅助一穴肛手术处于起步阶段。Phillips等[10]报道了1例ARM合并尿生殖窦畸形患儿的机器人手术,应用机器人手术系统成功完成子宫和阴道的分离,获得了良好的近期疗效。借助腹腔镜一穴肛畸形的手术经验,机器人手术可以较好地应用于直肠游离、尿道阴道的分离以及重建,从而减少后矢状切口广泛的尿道和阴道剥离,以获得良好的远期排尿、排便控制和保留阴道功能。
2001年9月,Marescaux等[25]在美国纽约成功通过跨大西洋卫星,为远在3 100英里以外的法国斯特拉斯堡1例68岁女性患者实施机器人胆囊切除术(使用编解码器和预留带宽,时间延迟约155 ms),这标志着远程手术时代的到来。2019年2月27日,西班牙医生Georgiou等[26]通过5G网络,完成了全世界首例依靠5G网络进行远程指导的手术。此外,远程护理机器人手术系统也引起了人们的兴趣。目前,还没有采用5G网络进行儿童远程手术的报道,但这给儿外科医生带来了机遇,儿童ARM远程手术或成为未来设定的目标。
RAARP适用于ARM合并直肠膀胱瘘、直肠前列腺尿道瘘和直肠阴道瘘的患儿,虽然手术成本较高,但总体疗效不亚于LAARP。此外,RAARP固有的技术优势可缩短学习曲线,减少ARM合并直肠膜部尿道瘘患儿腔镜手术中尿道、阴道损伤的风险。在ARM合并瘘管位置较低或复杂直肠肛门畸形患儿中,RAARP可能具有更高的成功概率,未来探索RAARP疗效的过程中应重点关注其对ARM合并瘘管位置较低或复杂直肠肛门畸形的治疗结果,并与Peña手术进行比较。
所有作者声明不存在利益冲突

























