
比较机器人辅助前入路根治性前列腺切除术(前入路RARP)和机器人辅助膀胱后入路根治性前列腺切除术(后入路RARP)的术后结果和尿控恢复时间。
回顾性分析浙江大学医学院附属邵逸夫医院2016年10月至2018年1月的92例进行RARP的低、中危局限性前列腺癌患者[前列腺特异性抗原(PSA)≤20 μg/L,临床TNM分期≤cT2bN0M0,Gleason评分≤7]的临床资料,其中52例施行前入路RARP(前入路组),40例施行膀胱后入路筋膜内RARP(后入路组)。比较两组患者临床资料、围手术期指标(手术时间、术中出血、术后感染、术后漏尿、术后病理分期、术后Gleason评分)及手术效果(切缘阳性率和术后尿控恢复时间)。
92例手术均顺利完成。前入路组手术时间(103±23) min,后入路组(130±26) min,差异有统计学意义(P<0.05)。前入路组术中出血(100±54) ml,术后感染率为5.8%(3/52),术后漏尿率为3.8%(2/52);后入路组则分别为(103±64) ml、5.0%(2/40)、2.5%(1/40),两组差异均无统计学意义(均P>0.05)。前入路组切缘阳性率为7.7%(4/52),后入路组切缘阳性率为12.5%(5/40),两组差异无统计学意义(P>0.05)。两组间即刻、1周、1个月、3个月尿控恢复率比较,后入路组均优于前入路组,差异均有统计学意义(均P>0.05);但6个月尿控恢复率差异无统计学意义(P>0.05)。
膀胱后入路RARP术后可获得较为满意的肿瘤控制,术后早期尿控恢复较传统前入路RARP具有明显优势,是治疗局限性前列腺癌的可选术式。


前列腺癌是泌尿系统常见的恶性肿瘤。近年来,我国部分发达地区前列腺癌发病率快速增长,跃居所有肿瘤第4位[1]。根治术是局限性前列腺癌的最佳治疗方式,自2000年6月实施全球首例机器人辅助腹腔镜根治性前列腺切除术(robot-assisted laparoscopic radical prostatectomy,RARP)以来[2],达芬奇机器人手术系统凭借其高清的3D术野和灵活的机械臂操作,成为治疗局限性前列腺癌的推荐手术方式。随着RARP快速发展,加上对前列腺解剖更进一步的认识,手术入路多种多样。其中需要分离Retzius间隙的前入路RARP是目前主流的手术方式。2010年意大利泌尿外科医生Galfano等[3]对传统前入路RARP进行了改良,首创机器人辅助膀胱后入路根治性前列腺切除术,获得了较好的术后尿控恢复和性功能恢复。本团队2016年在国内报道了5例机器人辅助膀胱后入路RARP的初步经验[4],之后继续开展此术式,现将其与传统前入路RARP进行比较,报告如下。
本研究作为一项回顾性病例对照研究,经浙江大学医学院附属邵逸夫医院医学伦理委员会审查同意(批件号:科研20200105-9)。回顾性分析浙江大学医学院附属邵逸夫医院两个医疗组在2016年10月至2018年1月连续完成的92例低、中危局限性前列腺癌RARP患者[前列腺特异性抗原(PSA)≤20 μg/L,临床TNM分期≤cT2bN0M0,Gleason评分≤7]的临床资料,其中包括52例传统前入路RARP(前入路组)和40例膀胱后入路RARP(后入路组),两种方式的手术分别由两组术者完成。因患者术前临床分期均为低、中危局限性前列腺癌,因此92例患者均未进行盆腔淋巴结清扫术。92例患者均为体检发现PSA升高,超声引导下行经直肠前列腺穿刺活检确诊为前列腺癌。术前前列腺增强MRI均未提示精囊腺侵犯和盆腔淋巴结转移。术前同位素全身骨扫描均未见远处转移。所有患者术前尿控均正常。两组患者年龄、体质指数(BMI)、前列腺体积、术前PSA等资料差异均无统计学意义,具有可比性(表1)。
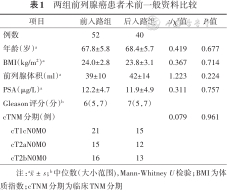
两组前列腺癌患者术前一般资料比较
两组前列腺癌患者术前一般资料比较
| 项目 | 前入路组 | 后入路组 | t/χ²值 | P值 |
|---|---|---|---|---|
| 例数 | 52 | 40 | ||
| 年龄(岁)a | 67.8±5.8 | 68.4±5.7 | 0.419 | 0.677 |
| BMI(kg/m2)a | 24.0±2.8 | 23.8±3.1 | 0.367 | 0.714 |
| 前列腺体积(ml)a | 39±10 | 42±14 | 1.223 | 0.224 |
| PSA(μg/L)a | 12.2±4.7 | 11.9±4.9 | 0.311 | 0.757 |
| Gleason评分(分)b | 6(5,7) | 7(5,7) | ||
| cTNM分期(例) | 0.079 | 0.961 | ||
cT1cN0M0 | 21 | 15 | ||
cT2aN0M0 | 15 | 12 | ||
cT2bN0M0 | 16 | 13 |
注:a;b中位数(大小范围),Mann-Whitney U检验;BMI为体质指数;cTNM分期为临床TNM分期
手术体位及操作通道建立:全身麻醉成功后,取半截石位固定下肢,双侧肩部放置肩托,患者取30°~40° Tredelenburg体位。选用美国Intuitive Surgical公司的第三代达芬奇机器人手术系统及机器人专用手术器械,采用3个机器臂及1个辅助通道完成手术。机器人镜头12 mm Trocar取脐上2~4 cm处,1号臂和2号臂8 mm Trocar取平脐水平距脐8~10 cm处,3号臂8 mm Trocar取右侧1号臂Trocar外侧8~10 cm处,取左侧2号臂外上方8~10 cm处植入12 mm Trocar作为辅助通道。对接机器臂与Trocar后安装器械:1号机械臂器械为机器人Monopolar单极电剪,2号机械臂器械为机器人Fenestrated双极抓钳,3号机械臂器械为机器人Prograp抓钳。
传统前入路RARP:经腹腔途径,首先分离至耻骨后间隙,暴露前列腺和双侧盆底筋膜反折。然后切开双侧筋膜反折,8字形缝扎阴茎背深复合体,电剪沿前列腺边缘游离出膀胱颈并予以切开,沿膀胱颈口向下游离出双侧输精管及精囊,提起精囊,暴露狄氏筋膜并切开,分离前列腺直肠间隙,沿双侧前列腺包膜向前列腺尖部分离,离断前列腺尖部,剪断尿道,完整切除前列腺。使用2-0可吸收滑线连续缝合尿道与膀胱,留置20Fr三腔导尿管,耻骨后放置引流管1根。最后取出标本,缝合切口。
膀胱后入路RARP:经腹腔途径,从Douglas窝处打开5~6 cm腹膜,找到并游离双侧输精管及精囊,离断双侧输精管,用带线荷包针膀胱及精囊进行悬吊使手术视野更好地暴露。寻找狄氏筋膜并从前列腺筋膜内的层面钝性将其推开直至前列腺尖部。找到膀胱颈前列腺连接部,通过筋膜内技术紧贴前列腺表面自前列腺两侧向前列腺腹侧分离,通过Hem-o-lok夹闭和钝性分离,将神经血管束从前列腺完全游离并显露膀胱颈部尿道。离断膀胱颈后继续在筋膜内钝性游离前列腺直至前列腺尖部,分离出尿道并离断,标本完整切除。松开悬吊膀胱的荷包线,2-0可吸收滑线从12点钟方向开始进行膀胱颈尿道连续吻合。留置20Fr导尿管1根。关闭Douglas窝处打开的腹膜,腹腔放置引流管1根。最后取出标本,缝合切口。
记录所有患者的手术时间、术中出血量、术中及术后输血量、术后感染和漏尿等并发症发生情况、术后导尿管留置时间、术后病理Gleason评分、切缘阳性情况,根据病理结果评估术后病理分期。拔除导尿管后每周电话随访1次,记录尿控情况。术后6周门诊再次随访,检测PSA。随后术后前3个月每月复查1次PSA,之后每3个月复查1次PSA。控尿功能每月随访1次。本研究中术后尿控即刻恢复指患者拔除导尿管后无需使用尿垫。
采用SPSS 20.0软件进行统计学分析。K-S检验符合正态分布的计量资料采用表示,组间比较采用Student′s t检验;非正态分布的计量资料采用中位数(大小范围)表示,组间比较采用Mann-Whitney U检验;计数资料采用例数(%)表示,组间资料的比较用χ2检验。所有的统计学检验均采用双侧检验,取α=0.05。
92例手术均顺利完成,无中转开放病例,无术中术后输血病例,无严重术中、术后并发症发生。其中前入路组3例出现术后发热,白细胞和C反应蛋白(CRP)升高,可疑感染,予以哌拉西林他唑巴坦治疗后均好转;2例出现术后漏尿,均在术后1周内自行缓解。后入路组2例出现术后发热,白细胞和CRP升高,可疑感染,予以哌拉西林他唑巴坦治疗后均好转;1例出现术后漏尿,术后第4天缓解。前入路组手术时间(103±23) min,后入路组(130±26) min,两组差异有统计学意义(t=5.246,P<0.05)。两组术中出血、术后感染率、术后漏尿率比较差异均无统计学意义(均P>0.05)(表2)。
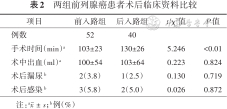
两组前列腺癌患者术后临床资料比较
两组前列腺癌患者术后临床资料比较
| 项目 | 前入路组 | 后入路组 | t/χ²值 | P值 |
|---|---|---|---|---|
| 例数 | 52 | 40 | ||
| 手术时间(min)a | 103±23 | 130±26 | 5.246 | <0.01 |
| 术中出血(ml)a | 100±54 | 103±64 | 0.223 | 0.824 |
| 术后漏尿b | 2(3.8) | 1(2.5) | 0.130 | 0.719 |
| 术后感染b | 3(5.8) | 2(5.0) | 0.026 | 0.872 |
注:a;b例(%)
92例手术后均达到根治标准(术后6周PSA<0.02 μg/L)。两组术后Gleason评分与术前基本一致。前入路组术后病理分期pT2aN0M0 31例,pT2bN0M0 14例,pT2cN0M0 7例,后入路组术后病理分期pT2aN0M0 19例, pT2bN0M0 15例,pT2cN0M0 6例,两组比较差异无统计学意义。前入路组切缘阳性率为7.7%(4/52),后入路组切缘阳性率为12.5%(5/40),两组差异无统计学意义(χ²=0.592,P>0.05)。切缘阳性患者术后辅助雄激素去势治疗,部分患者待尿控恢复正常后予以放疗。所有患者在术后随访6个月期间均未出现PSA生化复发和肿瘤复发表现(表3)。
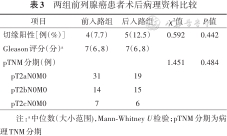
两组前列腺癌患者术后病理资料比较
两组前列腺癌患者术后病理资料比较
| 项目 | 前入路组 | 后入路组 | χ²值 | P值 |
|---|---|---|---|---|
| 切缘阳性[例(%)] | 4(7.7) | 5(12.5) | 0.592 | 0.442 |
| Gleason评分(分)a | 7(6,8) | 7(6,8) | ||
| pTNM分期(例) | 1.451 | 0.484 | ||
pT2aN0M0 | 31 | 19 | ||
pT2bN0M0 | 14 | 15 | ||
pT2cN0M0 | 7 | 6 |
注:a中位数(大小范围),Mann-Whitney U检验;pTNM分期为病理TNM分期
两组患者常规术后第14天拔除导尿管,其中3例漏尿患者在漏尿停止后第14天拔除导尿管。两组间即刻、1周、1个月、3个月尿控恢复率比较,后入路组均优于前入路组,差异均有统计学意义(χ²=43.960、47.230、23.610、4.253,均P>0.05)。两组间6个月尿控恢复率差异无统计学意义(χ²=0.778,P>0.05)(表4)。
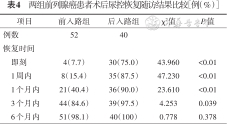
两组前列腺癌患者术后尿控恢复随访结果比较[例(%)]
两组前列腺癌患者术后尿控恢复随访结果比较[例(%)]
| 项目 | 前入路组 | 后入路组 | χ²值 | P值 |
|---|---|---|---|---|
| 例数 | 52 | 40 | ||
| 恢复时间 | ||||
即刻 | 4(7.7) | 30(75.0) | 43.960 | <0.01 |
1周内 | 8(15.4) | 35(87.5) | 47.230 | <0.01 |
1个月内 | 21(40.4) | 36(90.0) | 23.610 | <0.01 |
3个月内 | 44(84.6) | 39(97.5) | 4.253 | 0.039 |
6个月内 | 51(98.1) | 40(100) | 0.778 | 0.378 |
近十余年来,前列腺及其周围组织的解剖有了更精确的定义,包括前列腺筋膜分层、神经血管束、阴部副动脉、尿道括约肌复合体等[5, 6, 7]。达芬奇机器人手术系统基于更高的放大倍数以及机器臂内腕的灵活旋转,使泌尿外科医生在术中对前列腺及其周围组织进行更为精细的解剖成为可能,并促成了一些新技术的产生,包括保留耻骨膀胱复合体技术、更大程度地保留神经的Veil of Aphrodite技术以及本研究采用的膀胱后入路技术[3, 8, 9, 10]。
术后尿失禁和性功能丧失是前列腺癌根治术后最主要的并发症。目前为止的多项临床试验均认为相对于传统前入路RARP,后入路RARP的最大优势在于早期尿控的恢复[11, 12, 13]。Galfano等[10]对200例行机器人辅助完全后入路筋膜内前列腺癌根治术的患者数据进行了分析,发现超过90%的患者拔除导尿管后即刻恢复自主尿控,是目前已有报道最好的早期尿控恢复数据。本研究40例后入路RARP患者中即刻尿控恢复比例为75.0%,明显高于前入路RARP组,进一步验证后入路RARP在术后尿控的恢复方面的巨大优势。进一步随访发现,后入路组1周内、1个月内、3个月内尿控恢复比例均高于前入路组,并且1周内、1个月内尿控恢复比例的优势较大,随着术后时间的推移,这种优势逐渐减少,并且两组术后6个月的尿控恢复比例无明显差异,这也说明后入路RARP在术后尿控恢复的优势主要在于早期的尿控恢复,可较大程度地改善患者术后早期生活质量,这也与国外文献报道相符[11,13]。
尽管膀胱后入路RARP在早期尿控方面具有巨大优势,但新的手术方式必须对其安全性进行考量[14]。在肿瘤控制方面,Galfano等[10]报道中总切缘阳性率为26%,pT2期患者切缘阳性率为15%,pT3期患者切缘阳性率为45%,均高于前入路RARP文献报道中的同类数据。本研究中两组患者术后切缘阳性率均较低,并且两组比较无明显差异,这可能与本研究的患者均为中-低危局限性前列腺癌患者,分期相对较低有关。尽管前列腺癌术后2 mm以下的局灶性的切缘阳性是否影响预后仍存在疑问[15],并且有研究认为在局限性前列腺癌患者或Gleason评分<8分的前列腺癌患者中,术后切缘阳性不是一个影响预后的独立因素[16]。但是考虑到传统肿瘤手术应当遵循的无瘤原则,本研究仍认为患者的正确选择对此术式术后肿瘤控制至关重要,应选择T1或T2期患者,避免T3期患者施行此术式。尽管本研究中两组患者分别出现了7.7%和12.5%的切缘阳性率,但术后PSA检验提示所有患者均达到根治标准(术后6周PSA<0.02 μg/L),并且术后随访6个月均未出现PSA生化复发和肿瘤复发表现。这些结果提示两种手术方式在短期的肿瘤控制方面无明显差异。但是本研究随访时间较短,仍需要长时间随访验证。在术中术后并发症的发生方面,本研究发现膀胱后入路RARP并未明显增加术中术后出血、术后漏尿、术后感染的发生几率,这也与其他文献报道相符,说明这是一种安全的可行的手术方式。
此术式的学习曲线研究尚未见报道。笔者体会,对于有较多前入路RARP手术经验的术者来说,膀胱后入路RARP并无特别学习难度。但相对于前入路RARP,术中需要悬吊膀胱,手术空间稍狭小,尿道连续性的重建难度稍大,需要一定的适应和学习过程,会一定程度地增加手术时间。本研究提示后入路组手术时间长于前入路组,考虑与上述因素有关。总体来说,对于局限性前列腺癌患者,机器人辅助膀胱后入路根治性前列腺切除术后可获得较为满意的肿瘤控制,术后早期尿控恢复较传统前入路RARP具有明显优势,是治疗局限性前列腺癌的可选术式。但本研究为回顾性研究,样本量较小,研究结论仍需进一步的多中心大样本随机对照试验的验证。
所有作者均声明不存在利益冲突

























