探讨应用混合现实技术辅助肺小结节精准定位的可行性。
选取解放军总医院第一医学中心胸外科的肺部小结节患者1例,术前检查完善,无绝对手术禁忌,拟行胸腔镜肺楔形切除术。术前利用患者平卧位胸部CT对患者体表及靶病变进行三维重建,拟定辅助线,使用hookwire定位针对靶病变进行穿刺定位,利用术中CT进一步验证定位的准确性,进而对病变进行楔形切除。
病变定位准确,患者术后4 d顺利出院。
混合现实技术辅助下肺小结节精准定位切除病例1例,定位过程顺利,定位准确,有望开创胸外科肺小结节定位中新篇章,该技术的进一步探索和应用将为胸外科手术带来更多的发展可能和进步前景。


版权所有,未经授权,不得转载、摘编本刊文章,不得使用本刊的版式设计。
除非特别申明,本刊刊出的所有文章不代表中华医学会和本刊编辑委员会的观点。
本刊为电子杂志,以光盘形式出版。本册应读者需求按需印刷,随光盘免费赠阅,光盘如有质量问题,请向编辑部调换
高分辨率CT普及以来,伴随肺部结节检出率的提高,肺部小结节的诊疗逐渐成为业界热门话题之一。而由于外科手术的逐渐精准化,针对肺部小结节的定位和手术方式更是一直以来的聚焦热点,即如何更准确地定位肺部小结节并对其进行精准切除,在保证预后的条件下,更多保留患者肺功能。在肺部小结节,尤其是磨玻璃密度结节的手术中,基于磨玻璃密度结节与周围肺组织密度接近,且可能不存在胸膜牵拉的标志性特征,在胸腔镜下探查无法明确肿物位置的概率高达70%左右[1]。因此,亟待一种能够直观定位肺部小结节的方法辅助手术的进行。
混合现实(mixed reality,MR)技术作为虚拟现实技术的进一步发展,通过在现实场景呈现虚拟场景信息,在现实世界、虚拟世界和用户之间搭建起一个交互反馈的信息回路,以增强用户体验的真实感。其一旦进行校准后,目镜中所见到的虚拟影像在理想状态下不会随目镜的运动而改变位置的特点,以及虚拟影像与真实物体重叠后,观察者能同时观察到真实物体与虚拟影像的特点,为肺部小结节的定位提供了可能性。
笔者现将解放军总医院第一医学中心胸外科使用混合现实技术辅助肺部小结节精准定位切除的手术1例报道如下。
患者男性,44岁,主因"体格检查发现左肺上叶结节3个月余"入院。既往无特殊病史。入院后胸部增强CT提示:左肺上叶尖后段见一磨玻璃密度结节影,约8.8 mm×7.7 mm,其内见小支气管影穿行,考虑早期肺癌可能性大。完善相关术前检查后,拟于2018年3月20日于解放军总医院第一医学中心行混合现实技术辅助胸腔镜左肺上叶楔形切除术备固有上叶切除术。
结合患者术前影像学检查结果考虑,左肺上叶磨玻璃密度阴影,周围型,恶性可能性大,位于左肺上叶尖后段与前段之间,解剖性肺段切除无法达到肿瘤的R0切除。患者为中年男性,为更多保留患者肺功能,故手术方式决定为混合现实技术辅助定位胸腔镜下左肺上叶楔形切除术。
手术当日在患者体表骨性标记点处放置电极片作为影像匹配用标记点。嘱患者平卧位双侧手臂置于身体两侧,行胸部CT平扫检查。利用该CT所得影像学资料,术前对患者胸壁皮肤及体表标记、肋骨、肿瘤和肺组织进行三维重建。通过术前胸部CT可知,肿瘤平对左侧第3肋骨上缘,因此在三维重建模型中添加由肿瘤向体表垂直方向的辅助线,通过第3肋骨上缘,长度与拟使用的穿刺定位hookwire定位针等长(全长10.7 cm)。
患者全身麻醉后,将患者以术前胸部CT平扫检查时相同体位进行摆放。使用星图系统将混合现实技术全息影像投影至患者体表,利用标记点及体表特征性标志(如乳头)进行图像与患者身体的匹配重合。常规消毒后,术者使用hookwire定位针在混合现实技术全息影像引导下沿辅助线垂直向下穿刺,达到穿刺针最终与定位线完全重合。使用术中CT机对穿刺后患者的肺部及肿瘤进行扫描,可见穿刺针通过肿瘤,定位结束。常规使用"单操作孔"胸腔镜入路,以切割闭合器在距离穿刺部位2 cm处楔形切除病变。
患者术后4 d恢复良好,顺利出院。术后病理提示:左肺上叶腺癌,贴壁为主型。
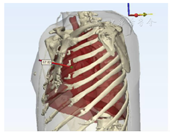



注:图A、C为校准匹配过程;图B为穿刺定位过程(因拍摄角度误差,图像未完全重合,属正常现象,实际观察到的影像为完全重合);图D为穿刺定位的结节
2017版NCCN指南的外科治疗原则中指出,对于满足以下条件的患者,可选择肺段切除(首选)或楔形切除术,即周围性结节≤2 cm,至少具有下列1个特征:①组织学类型为单纯原位腺癌;②CT显示结节磨玻璃样表现≥50%;③影像学监测证实倍增时间长(≥400 d)。并且要求切除后肺切缘应达到≥2 cm或大于等于结节的大小。肺段切除术在肺磨玻璃密度小结节的手术中占据了精准切除与淋巴结清扫彻底及可能存在的更优的手术预后等多种优势,但肺段交界部位的肺部小结节却无法适用。而亚肺段联合切除术由于亚肺段解剖更加精细复杂,变异多,对于经验较少的医师尚需要三维重建等多学科的综合辅助、操作难度大等,普及程度尚较差。因此,胸腔镜肺部楔形切除术仍存有一定的优势[2]。但由于楔形切除术属于非解剖性切除术,肺部小结节的精准定位在术中则尤为重要。
目前已有报道的肺部小结节定位方法主要分为术前定位、术中定位及导航定位三大类。术前CT定位由于患者运输过程风险过高,已逐渐被其他两种定位所取代。而术中CT定位的方法也是多种多样,主要有经皮hookwire定位、经皮弹簧圈定位、凝胶注入定位、经皮肺表面亚甲蓝染色定位、经皮肺表面置入荧光粒子或放射性粒子定位等[3]。导航定位又分为磁导航定位、光导航定位、VAL-MAP等。不同定位方法的优缺点各不相同,但有文献提示,通过3D-CTBA指导下的小结节定位能更准确且并发症发生风险更低[4]。
解放军总医院第一医学中心胸外科所使用的混合现实技术辅助肺小结节定位的方法是更优于3D-CTBA辅助下定位的显示更加直观的定位方法,在国内目前鲜有报道,且在胸外科手术中的应用尚处于初探阶段。目前国际上现有的混合现实技术应用于医疗领域的报道主要在神经外科和血管外科。因此,解放军总医院第一医学中心胸外科尝试应用此种方法进行术中小结节的定位;该方法中涉及术前三维重建无须增强CT,且无须重建血管及气管走行,仅重建胸壁、肋骨及病变的位置即可完成,简便易行,可操作性高。将小结节的三维成像呈现于术者视野中,使术者在直观下进行操作。解放军总医院第一医学中心胸外科首次使用该技术进行术中定位,技术应用还不够成熟,尚需要术中CT辅助进行验证,但该技术的引入有希望取代术中CT机的使用,有一定的拓展和普及可能。
混合现实技术目前也存在一定的不足。如术中定位过程历时过长,主要原因在于无法自动进行图像校准匹配。该项工作目前已结合新的定位技术提高了配准效率,大大降低了匹配时长,在神经外科已有应用。因此,解放军总医院第一医学中心胸外科混合现实技术的小结节定位有望进一步进行技术革新。另外,不同目镜中所呈现的图像位置有微小的差异,主要由于该成像技术对于环境有一定的要求,在变换过于复杂的环境中容易出现图像不稳定而导致位置的偏差,这需要定位过程中将环境混杂因素进一步降低,以优化定位流程。另外,胸外科手术麻醉中肺部的膨胀情况与术前CT中肺部的膨胀情况有一定的差异,其主要原因可能来自于全身麻醉对于呼吸肌的影响,这使根据术前CT影像所重建的患者三维影像与术中存在一定差异,可能导致穿刺定位的误差。该技术目前仍在不断开发中,有望进一步提高了配准的精度,缩短手术时长,对于进一步提高定位的精准度有一定的帮助,相信该技术的进一步探索和应用将为胸外科手术带来更多的发展可能和进步前景。

























