
患者,女性,56岁,自述右下后牙缺失5年余,现要求修复缺失牙。
45、46牙缺失,缺牙间隙近远中向18 mm, 龈距6~7 mm,CBCT检查显示缺牙区为Ⅲ类骨质,骨量充足,骨密度良好,角化龈充足。
龈距6~7 mm,CBCT检查显示缺牙区为Ⅲ类骨质,骨量充足,骨密度良好,角化龈充足。
通过口腔检查和CBCT影像学检查,诊断为牙列缺损(45、46牙)。
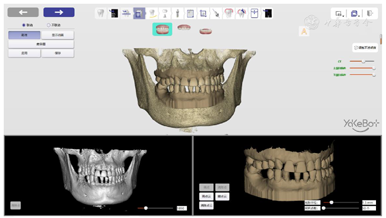
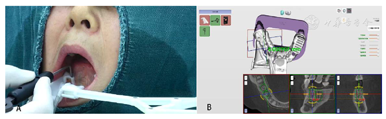
术前将颌骨数据和口内扫描数据导入自主式口腔种植机器人系统软件中,规划种植体位置、设计机器人种植步骤、设计机器人用手术配件;术中自主式口腔种植机器人在缺牙区微创植入两枚种植体;术后在机器人系统软件中评价种植精度。
种植手术3个月后,完成最终修复。
口腔科


版权归中华医学会所有。本文为遵循CC-BY-NC-ND协议的开放获取文章。
牙列缺损(dentition defect)是指在上颌或下颌的牙列内有数目不等的牙缺失,同时仍余留数目不等的天然牙[1]。目前种植修复是牙列缺损的首选方案,种植牙被称为"人类的第三副牙齿"。精准植入是种植体长期稳定的重要基础,也是广大种植医师所不懈追求的目标[2,3]。由赵铱民教授团队历时8年时间研发的世界首台自主式口腔种植机器人,可以预先在虚拟三维图像中,进行种植体优化设计定位,在非直视条件下和狭小的空间内精准地实施种植体植入术,并能精准地实现即时种植修复[4,5]。
患者,女性,56岁,主诉:右下后牙缺失5年余,现要求修复。
现病史:患者5年前右下后牙因残根拔除,未行修复治疗。现因牙齿缺失影响咀嚼功能,要求修复。平素体健,否认糖尿病、高血压等全身系统性疾病史,否认肝炎、结核等传染病史,否认药物过敏史,否认手术史。
口内检查:45、46牙缺失,缺牙间隙近远中向18 mm,颊舌向9 mm, 龈距6~7 mm,对
龈距6~7 mm,对 牙略伸长,邻牙无倾斜;前牙散在间隙;张口度正常,颞下颌关节无弹响、无疼痛;缺牙区角化龈充足(图1)。
牙略伸长,邻牙无倾斜;前牙散在间隙;张口度正常,颞下颌关节无弹响、无疼痛;缺牙区角化龈充足(图1)。

 面照;B:颊面照面照;B:颊面照
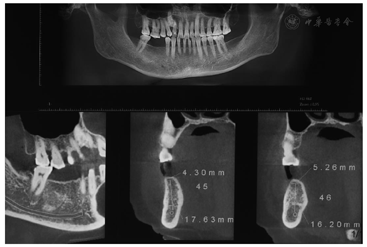
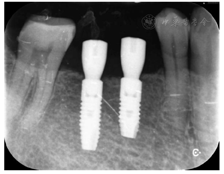
面照;B:颊面照面照;B:颊面照CBCT检查:45牙缺牙区牙槽嵴顶宽度4.30 mm,高度17.63 mm;46牙缺牙区牙槽嵴顶宽度5.26 mm,高度16.20 mm(图2)。
牙列缺损(45、46牙)。
综合考虑患者缺牙区软硬组织情况及修复空间,决定种植义齿修复(虽然患者45、46牙缺牙区牙槽嵴顶宽度略窄,但高度充足,可适当增加植入深度,从而避免骨增量)。患者对于手术疼痛有较多顾虑,希望采取更加微创、精准的手术方式,所以我们计划使用自主式口腔种植机器人来完成种植手术。
自主式口腔种植机器人系统能够在医生的监控下,根据指令自主地完成口腔种植的主要手术操作,并可以融合感知到的视觉信息与力觉信息对手术操作精度进行判断,实时发出指令进行调整,以保证实现精准、微创、安全的手术效果。为了机器人更好的完成种植手术,该款系统还配备了一款强大的软件系统DentalNavi(雅客智慧,中国)。同时该系统还制定了详细的安全策略,例如:主动吸唾装置、坐姿种植、随动功能以及安全急停设计等。前期机器人临床种植病例显示种植精度约为0.3 mm。这位患者计划在缺牙区植入2枚植体,术后使用扫描杆进行精度评估。
种植义齿修复45、46缺失牙。45牙缺牙区植入1枚4.0 mm×11.0 mm柱型植体,46牙缺牙区植入1枚5.0 mm×11.0 mm柱型植体(Astra TX,Dentsply Sirona,美国)。

 面观;B:颊面观
面观;B:颊面观
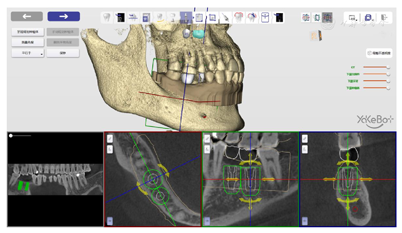
绘制右侧下颌神经管,明确神经管在下颌骨中的位置(图6)。


在植体库中选择适合的植体,45牙为4.0 mm×11.0 mm柱型植体,46牙为5.0 mm×11.0 mm柱型植体,再根据牙冠穿出位点和骨量确定45、46牙种植体的位置(图8)。
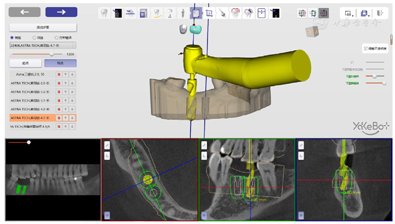
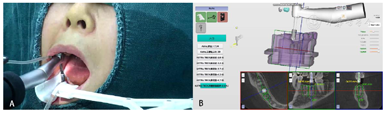
根据种植体型号,规划机器人种植的下钻次序,在这一过程中,可以调整每一钻下钻的转速、起点、终点,同时要调整种植手机的姿态,避免种植手机柄部同邻牙发生碰撞同时避开软组织(图9)。
设计用于辅助机器人种植的手术配件,包括开口装置、视觉标记携带器、吸唾装置及注册孔等(图10)。


术中植体植入后,利用精度验证修复体可实时判断植入精度(图12)。

末端执行器沿着X、Y、Z轴各旋转一定角度,以此来定位末端执行器在视觉范围内的精准空间位置,并消除末端执行器自身重力对力传感器的影响,这一步又叫作机器人的"手眼标定"(图13)。



将探针依次置于5个预设的注册孔内,视觉完成5次标记,这样就完成了定位托盘和颌骨的注册。注册完成后,视觉通过识别定位托盘就明确了颌骨的空间位置(图16)。
在力伺服模式下,医生拖动末端执行器进行进出口路径的录制。末端执行器将严格按照录制的进出口路径自主运动到种植路径的起点,因记录的是患者和末端执行器的相对位置关系,所以即使运动过程中患者发生移动,也会确保机器人末端可以安全地进出患者口腔。
机器人安全进入患者口内并自主进行种植窝洞的逐级制备,通过视觉伺服和力伺服精准控制末端执行的运动,保证机器人的种植精度和安全性(图17)。

在窝洞制备完成后,机器人按照规划路径自主植入种植体。当到达预设深度时,自动抬起并退出到患者口外(图18)。
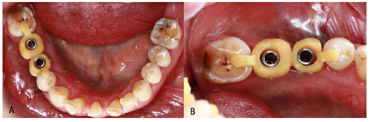
术后即刻拧入临时基台,戴入术前制作的精度验证修复体,修复体顺利就位,植体植入角度和位置均较为理想(图19)。
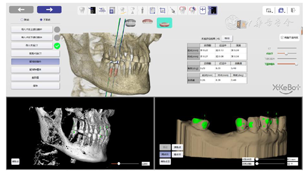
术后即刻拧入扫描杆,口内扫描数据导入DentalNavi软件,进行术后精度评价。结果显示45、46牙种植位置偏差均<0.3 mm,角度偏差<0.8°(图20)。

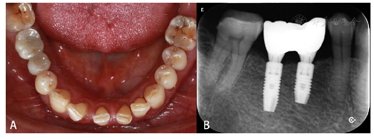
I期术后3个月复诊,患者自述种植区无明显不适,口内检查植体无明显松动,叩诊清音,牙龈愈合良好,X线检查种植体周围无明显阴影(图22),骨愈合良好。卸下愈合基台,穿龈形态良好,连接扫描杆进行口扫,氧化锆联冠修复,常规完成修复体制作与戴牙(图23)。

 面观;B:颊面观面观;B:颊面观
面观;B:颊面观面观;B:颊面观术后6个月后随访,修复体稳定,黏膜未见红肿退缩,X线片牙槽嵴顶边缘骨未见明显吸收(图24)。
理想的种植位点有利于获得更好的咬合功能及美学效果,同时也是实现软硬组织长期健康稳定的基础。精准地控制种植体植入的位置、角度和深度,实现以修复为导向的种植体植入是广大医生一直追求的目标。
自主式口腔种植机器人手术系统综合应用视觉传感、力传感、三维可视化和微型模块化机器人等技术,实现了机器人自主完成种植窝洞预备和种植体植入的操作。配套的软件具有术前配准、植体位置及机器人运动路径的规划、配件设计、术中实时导航及安全监测、术后精度评估等功能。同时系统中还增加了安全防护策略,包括随动校准、力反馈、急停设计和安全防护座椅四个安全保障,多重安全策略确保机器人手术的安全进行。
从本例的结果可以看出,自主式口腔种植机器人的种植精度较高,其精准、高效、微创、安全的特点得到了充分的展示。
谢瑞,白石柱,李志文,等.自主式口腔种植机器人的临床应用1例[DB/OL].中国临床案例成果数据库,2023(2023-01-12).http://journal.yiigle.com/LinkIn.do?linkin_type=cma&DOI=10.3760/cma.j.cmcr.2023.e00265.
所有作者均声明本研究不存在利益冲突

























