
使用Meta分析的方法分析比较机器人辅助和常规徒手开放椎弓根螺钉内固定的精确性和安全性。
计算机检索Pubmed、Embase、Cochrane library、中国生物医学文献(CBM)、万方、中国知网数据库(CNKI)中2016年12月1日前的文献。根据制定的纳入与排除标准,筛选合格文献并进行数据提取和质量评价。利用RevMan5.3软件进行Meta分析。对二分类数据采用相对危险度(RR)及95%置信区间(CI)表示效应差异。对连续型数据采用均数差(MD)或标准化均数差(SMD)表示效应差异。当P<0.05,95% CI不含数值1时说明差异有统计学意义。
共纳入266例患者,包括机器人辅助138例、常规徒手开放128例;共置入螺钉1 200枚,包括机器人辅助608枚、常规徒手开放592枚。结果显示,根据Gertzbein-Robbins分级标准(A、B、C),机器人辅助和常规徒手开放方法之间的椎弓根螺钉置钉准确率差异无统计学意义,其中A(RR=1.07,95%CI:0.82,1.39,I2=46%,P=0.62)、B(RR=1.56,95%CI:0.86,2.82,I2=0%,P=0.14)、C(RR=0.91,95% CI:0.32,2.55,I2=0%,P=0.85)。两组并发症发生率差异无统计学意义(RR=0.33,95%CI:0.05,2.17,I2=0%,P=0.25)。两组螺钉修复率差异无统计学意义(RR=0.53,95%CI:0.10,2.90,I2=0%,P=0.47)。两组手术时间差异有统计学意义(MD=20.90,95%CI:5.54,36.26,I2=15%,P=0.008)。两组辐射曝光时间差异有统计学意义(SMD=-1.19,95%CI:-1.63,-0.75,I2=0%,P<0.000 01)。两组螺钉与关节面的距离差异有统计学意义(SMD=-1.15,95%CI:0.79,1.51,I2=16%,P<0.000 01)。
与常规徒手开放方法相比,目前的证据尚不能证实机器人辅助系统在椎弓根螺钉内固定的手术精确率与并发症发生率方面存在明显优势。脊柱手术机器人辅助系统作为新技术应用于脊柱外科手术具有深入开发的潜能。


版权归中华医学会所有。
未经授权,不得转载、摘编本刊文章,不得使用本刊的版式设计。
除非特别声明,本刊刊出的所有文章不代表中华医学会和本刊编委会的观点。
20世纪90年代初以来,机器人辅助技术已经应用于多种外科学,包括普通外科、泌尿科、妇科。近10年来,这种技术逐步应用于脊柱手术,以提高手术精确度的同时最小化损害神经血管结构的风险,减少对患者和医护人员电离辐射的有害暴露,让更多的脊柱外科医生进入手术室[1]。大量研究显示,机器人辅助技术在脊柱手术中可提高内植物的置入精准度,明显减少X线透视辐射剂量,在可视化方面比徒手手术更具有优势。Liu等[2]的Meta分析显示,机器人辅助与徒手手术在椎弓根螺钉置钉精确率方面无显著性差异,但该分析在纳入文献质量、样本量和研究问题存在限制[2]。本文中,对机器人辅助和常规徒手开放椎弓根螺钉内固定的精确性和安全性进行系统评价和荟萃分析。
计算机检索Medline(Pubmed)、Embase、Cochrane library、中国生物医学文献、万方、中国知网数据库文献数据库中2016年12月1日前的文献。英文检索关键词和/或主题词为"robotics、robot-assisted、pedicle screws、spinal instrumentation、randomized controlled trial"等;中文检索关键词和/或主题词为"机器人、脊柱"。检索策略为主题词与自由词联合检索,并参照高敏感性随机对照试验(randomized controlled trail, RCT)试验策略。检索文献的参考文献和手工检索未发表的文献作为补充文献。
纳入标准:①研究类型为临床随机对照研究。②研究对象年龄大于18岁,为腰椎退行性改变(椎体滑脱、椎管狭窄、椎间盘突出)椎弓根螺钉内固定术适应症者。③术中是否应用辅助机器人技术为试验组和对照组的主要区别,且两组间影响椎弓根螺钉内固定精确率与安全性的其他危险因素无显著差异,即试验组与对照组样本均衡。④主要结局指标为椎弓根螺钉置钉精确率和并发症。
排除标准:①非脊柱机器人辅助椎弓根螺钉内固定手术者。②研究对象椎弓根先天畸形、腰椎结核、肿瘤及陈旧性骨折损伤者。③非随机对照试验、病例对照研究、个案报道、文献综述、系统评价、书信以及重复发表的文献。④基础医学研究(药理学、动物实验、尸体试验等)。⑤偏倚较高文献。
2名研究人员分别根据以上标准进行初步筛选和全文筛选,独立做出决定,然后将其结论进行比较。若两者结论不一致,由独立第三人进行判断和仲裁。
数据由2名研究人员独立提取,提取的数据内容包括第一作者、发表时间、国家、研究类型、研究对象特征、干预措施、结局指标以及随访时间。当研究结果不能直接用于Meta分析时,进行数据换算。根据牛津大学循证医学中心(Oxford Centre for Evidence Based Medicine,OCEBM)指南评价纳入研究的证据等级。采用Cochrane协作网评价偏倚风险工具对文献质量评价。纳入研究10个及以上时,漏斗图评价Meta分析结果是否存在发表偏倚。意见不一致时,通过第三名研究人员协商解决分歧。
利用Cochrane协作网提供的RevMan5.3软件进行Meta分析。首先,通过Q检验和计算I2值定性和定量评价各研究间异质性。当P>0.1,I2<50时认为异质性不显著,采用固定效应模型合并数据;当异质性显著时(P<0.1,I2>50),进行敏感性分析或亚组分析。对二分类数据采用相对危险度(relative risk,RR)及95%置信区间(confidence interval,CI)表示效应差异;对连续型数据采用均数差(mean difference,MD)或标准化均数差(standardised mean diffference,SMD)表示效应差异;当P<0.05,95%CI不含数值1时说明差异有统计学意义,P>0.05时则差异无统计学意义。
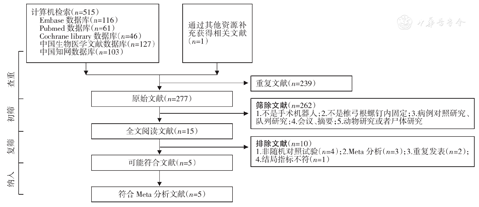
计算机检索后,由文献管理软件Endnote x7查重后获得文献277篇,仔细阅读文题和摘要后筛除文献262篇,然后进行全文阅读依据"研究方法"排除文献10篇,最后根据"是否有可分析的结局指标"纳入符合Meta分析要求的文献5篇[3,4,5,6,7]。(图1)
纳入Meta分析的5篇均为随机对照试验,纳入研究基本特征和椎弓根螺钉置入情况见表1、表2。
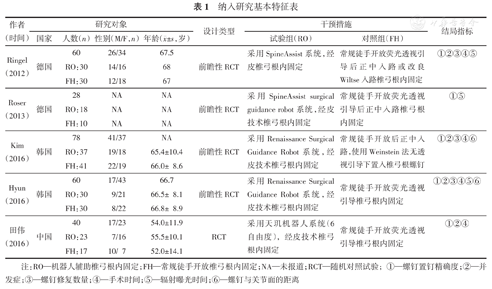
纳入研究基本特征表
纳入研究基本特征表
| 作者 (时间) | 研究对象 | 设计类型 | 干预措施 | 结局指标 | ||||
|---|---|---|---|---|---|---|---|---|
| 国家 | 人数(n) | 性别(M/F ·n) | 年龄(x±s ·岁) | 试验组(RO) | 对照组(FH) | |||
| Ringel (2012 ) | 德国 | 60 | 26/34 | 67.5 | 前瞻性RCT | 采用SpineAssist系统 ·经 皮椎弓根内固定 | 常规徒手开放荧光透视引导后正中入路或改良Wiltse入路椎弓根内固定 | ①②③④⑤ |
| RO :30 | 14/16 | 68 | ||||||
| FH :30 | 12/18 | 67 | ||||||
| Roser (2013 ) | 德国 | 28 | NA | NA | 前瞻性RCT | 采用SpineAssist surgical guidance robot系统 ·经皮 技术椎弓根内固定 | 常规徒手开放荧光透视 引导后正中入路椎弓根 内固定 | ①⑤ |
| RO :18 | NA | NA | ||||||
| FH :10 | NA | NA | ||||||
| Kim (2016 ) | 韩国 | 78 | 41/37 | NA | 前瞻性RCT | 采用Renaissance Surgical Guidance Robot系统 ·经 皮技术椎弓根内固定 | 常规徒手开放后正中入 路 ·使用Weinstein法无透 视引导下置入椎弓根螺钉 | ①②③④⑥ |
| RO :37 | 19/18 | 65.4±10.4 | ||||||
| FH :41 | 22/19 | 66.0± 8.6 | ||||||
| Hyun (2016 ) | 韩国 | 60 | 17/43 | 66.7 | 前瞻性RCT | 采用Renaissance Surgical Guidance Robot系统 ·经 皮技术椎弓根内固定 | 常规徒手开放荧光透视 引导椎弓根内固定 | ①②③④⑤⑥ |
| RO :30 | 9/21 | 66.5± 8.1 | ||||||
| FH :30 | 8/22 | 66.8± 8.9 | ||||||
| 田伟 (2016 ) | 中国 | 40 | 17/23 | 54.0±11.9 | RCT | 采用天玑机器人系统(6自由度) ·经皮技术椎 弓根内固定 | 常规徒手开放荧光透视 引导椎弓根内固定 | ①②④ |
| RO :23 | 7/16 | 55.5±10.1 | ||||||
| FH :17 | 10/7 | 52.0±14.1 | ||||||
注:RO—机器人辅助椎弓根内固定;FH—常规徒手开放椎弓根内固定;NA—未报道;RCT—随机对照试验;①—螺钉置钉精确度;②—并发症;③—螺钉修复数量;④—手术时间;⑤—辐射曝光时间;⑥—螺钉与关节面的距离
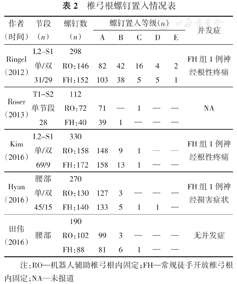
椎弓根螺钉置入情况表
椎弓根螺钉置入情况表
| 作者 (时间) | 节段 (n) | 螺钉数 (n) | 螺钉置入等级(n) | 并发症 | ||||
|---|---|---|---|---|---|---|---|---|
| A | B | C | D | E | ||||
| Ringel (2012 ) | L2-S1 | 298 | FH组1例神 经根性疼痛 | |||||
| 单/双 | RO :146 | 82 | 42 | 16 | 4 | 2 | ||
| 31/29 | FH :152 | 103 | 38 | 5 | 5 | 1 | ||
| Roser (2013 ) | T1-S2 | 112 | NA | |||||
| 单节段 | RO :72 | 71 | — | 1 | — | — | ||
| 28 | FH :40 | 39 | 1 | — | — | — | ||
| Kim (2016 ) | L2-S1 | 330 | FH组1例神 经根性疼痛 | |||||
| 单/双 | RO :158 | 148 | 9 | 1 | — | — | ||
| 69/9 | FH :172 | 158 | 13 | 1 | — | — | ||
| Hyun (2016 ) | 腰部 | 270 | FH组1例神 经损害症状 | |||||
| 单/双 | RO :130 | 127 | 3 | — | — | — | ||
| 45/15 | FH :140 | 133 | 5 | 1 | 1 | — | ||
| 田伟 (2016 ) | 腰部 | 190 | 无并发症 | |||||
| RO :102 | 99 | 3 | — | — | — | |||
| FH :88 | 81 | 6 | 1 | — | — | |||
注:RO—机器人辅助椎弓根内固定;FH—常规徒手开放椎弓根内固定;NA—未报道
纳入5篇研究共包括266例患者(机器人辅助138例、常规徒手开放128例),共置入螺钉1 200枚(机器人辅助608枚、常规徒手开放592枚)。其中1篇研究对象基线水平未作描述说明,原因是研究报告的结果是初步的;其余4篇均未见显著性差异。4篇采用Mazor Robotics机器人辅助系统作为干预措施,1篇采用天玑机器人系统;5篇研究的试验组均采用经皮技术,4篇对照组行常规徒手开放荧光透视引导,1篇使用Weinstein法无透视引导下置入椎弓根螺钉。主要结局指标为螺钉置钉精确度采用Gertzbein-Robbins分级标准(5篇),并发症(4篇)。次要结局为螺钉修复数量(3篇),手术时间(4篇),辐射曝光时间(3篇),螺钉与关节面的距离(2篇),住院时间(2篇),置入位置误差(1篇),VAS和ODI评分(1篇),术后引流量(1篇),输血次数(1篇)。
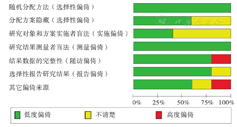
采用Cochrane协作网评价偏倚风险工具对文献质量评价(图2)。显示纳入的大多数研究的条目评估结果均为低偏倚风险。其中,4篇按1∶1随机分组,1篇依据随机数表法进行随机分组,3篇做了分配隐藏(2篇描述了分配隐藏具体方法);3篇对结果测量者采用盲法;1篇缺失数据但不足以对效应值产生影响;1篇部分资金支持来自Mazor和美敦力公司,并提供了机器人系统,但未参与研究设计、数据收集和分析、发表的计划和手稿准备,其他4篇无任何商业资金支持。
患者术后行CT扫描,根据CT薄扫图像对置入螺钉位置精确率进行评估。5篇均按照Gertzbein-Robbins分级标准对椎弓根螺钉在外侧、内侧、头侧和尾侧方向上皮质是否存在穿透情况进行评估。标准为A无皮质侵及;B皮质穿透<2 mm;C 2 mm≤皮质穿透<4 mm;D 4 mm≤皮质穿透<6 mm;E皮质穿透≥6 mm[3]。
根据A、B、C分级标准的机器人辅助组与徒手开放组椎弓根螺钉置钉的精确率的比较如图3所示。Meta分析结果显示,根据A级标准比较,各研究间有轻度异质性(P=0.12,I2=46%);采用固定效应模型分析,两组置钉精确率差异无统计学意义(RR=1.07,95%CI:0.82,1.39,I2=46%,P=0.62)。采用不同效应模型进行敏感性分析,固定效应模型的M-H(Mantel-Haenszel)法合并RR的点估计和区间估计为1.07(0.82,1.39),而随机效应模型的D-L(Dersimonian-Laird)法合并的RR的点估计和区间估计为0.82(0.46,1.46),敏感性分析前后结果没有本质上改变,说明小样本研究对合并效应量结果没有实质性改变,Meta分析结果可靠。根据B级标准比较,各研究间无异质性(P=0.48,I2=0%),两组置钉精确率差异无统计学意义(RR=1.56,95%CI:0.86,2.82,I2=0%,P=0.14)。根据C级标准比较,各研究间无异质性(P=0.54,I2=0%),两组置钉精确率差异无统计学意义(RR=0.91,95%CI:0.32,2.55,I2=0%,P=0.85)。
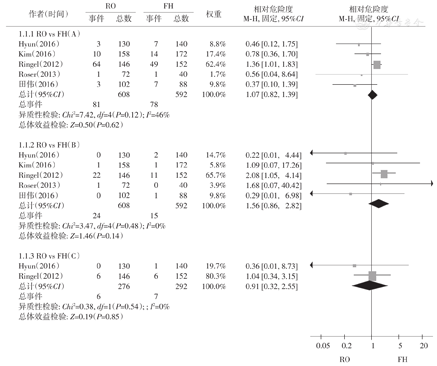
RO—机器人辅助椎弓根内固定;FH—常规徒手开放椎弓根内固定;M-H—Mantel-Haenszel
有4篇文献描述了并发症,其中3篇由于螺钉位置不良引发神经根性疼痛,1篇未见任何并发症。Meta分析结果显示,各研究间无异质性(P=1.00,I2=0%),两组并发症发生率差异无统计学意义(RR=0.33,95%CI:0.05,2.17,I2=0%,P=0.25)。(图4)
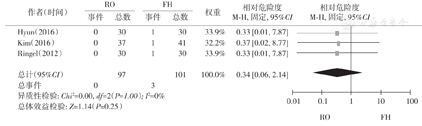
RO—机器人辅助椎弓根内固定;FH—常规徒手开放椎弓根内固定;M-H—Mantel-Haenszel
3篇文献中涉及螺钉修复率的Meta分析结果显示,各研究间无异质性(P=0.83,I2=0%),两组螺钉修复率差异无统计学意义(RR=0.53,95%CI:0.10,2.90,I2=0%,P=0.47)。(图5)
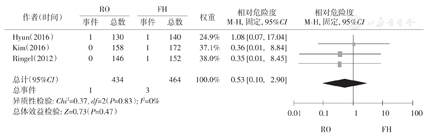
RO—机器人辅助椎弓根内固定;FH—常规徒手开放椎弓根内固定;M-H—Mantel-Haenszel
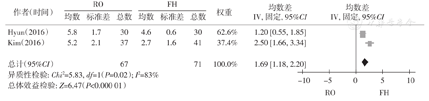
3篇文献中涉及手术时间的Meta分析结果显示各研究间无异质性(P=0.31,I2=15%),两组手术时间差异有统计学意义(MD=20.90,95%CI:5.54,36.26,I2=15%,P=0.008)。(图6)
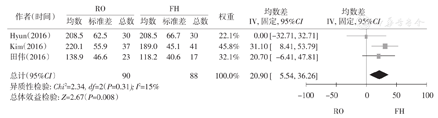
RO—机器人辅助椎弓根内固定;FH—常规徒手开放椎弓根内固定;IV—inverse variance
2篇文献涉及辐射曝光时间的Meta分析中,因2项研究的测量方法不一致,选取SMD作效应量,结果显示无异质性(P=0.35,I2=0%),两组辐射曝光时间差异有统计学意义(SMD=-1.19,95%CI:-1.63,-0.75,I2=0%,P<0.000 01)。
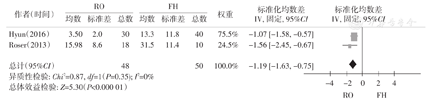
RO—机器人辅助椎弓根内固定;FH—常规徒手开放椎弓根内固定;IV—inverse variance
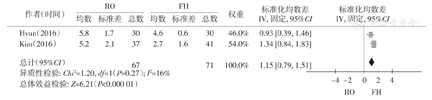
2篇文献中螺钉与关节面距离的均数差异达2倍以上,对于结局指标差异较大(图8),不适于使用MD作为合并统计量,改用SMD作为合并统计量进行分析,结果发现异质性大大减小,故采用固定效应模型对结果进行合并。Meta分析结果显示,两研究间无异质性(P=0.27,I2=16%),两组螺钉与关节面距离差异有统计学意义(SMD=-1.15,95%CI:0.79,1.51,I2=16%,P<0.000 01)。
RO—机器人辅助椎弓根内固定;FH—常规徒手开放椎弓根内固定;IV—inverse variance
RO—机器人辅助椎弓根内固定;FH—常规徒手开放椎弓根内固定;IV—inverse variance
目前,已有多种手术机器人应用于脊椎手术领域,如SpineAssist/Renaissance(美国)、SPINEBOT(韩国)、VectorBot(德国)、Neuroglide(瑞士)、ROSA Spine、TiRobot(中国)等机器人系统。其中,比较著名的是SpineAssist/Renaissance系统,已获得FDA和CE认证。1项随机对照研究表明,使用常规徒手技术执行的椎弓根螺钉固定精度优于机器人辅助技术[6],同时也有研究表明二者精确率无差别。然而,多个回顾性和少量前瞻性研究中显示,机器人辅助下的椎弓根螺钉置钉精确率显著优于常规徒手手术[3,4,5,7,8,9,10,11]。本研究结果显示,目前的证据尚不能支持上述结论[12]。Meta分析结果表明,在A、B、C螺钉置入分级标准下,尚不能认为机器人辅助比常规徒手开放椎弓根螺钉置入的精确率高。该结果的原因有多种。第一,三维图像采集和自动配准的过程中存在系统误差,这种误差是由成像原理造成的三维图像失真;此外,图像自动注册过程中也会出现计算机自动匹配精度误差,这些都影响之后椎弓根螺钉的参数设计和手术路径规划的数据,最终降低了精确度[7]。第二,机器人—患者连接方式多样,包括连接棘突夹具的平台,通过2条K-线固定到头侧和尾侧棘突;悬停T平台,通过1条K-线固定到头侧棘突的T形平台,以及通过2条额外的K-线固定到髂嵴两侧; "床架"平台,通过1条K-线固定头侧棘突,尾侧棘突附接所谓床架的手术台。安装平台固定的不稳固会导致椎弓根螺钉侧向偏移,以侵犯椎弓根的外侧壁最为常见 [3,4,5]。Kim等[3]研究中侵占方向均为外侧壁;Hyun等[4]研究中3个B级的螺钉侵占方向均为外侧;Ringel等[5]研究中C+D+E级22个螺钉侵占方向为外侧的有18个。螺钉侧向偏移不仅降低了精确度,甚至产生严重并发症,如持续性的神经性疼痛等,需要二次手术进行修复。第三,肌肉韧带等软组织对手术通道的影响。在经皮技术操作中,不可忽视肌肉韧带等软组织对手术通道的推挤或阻挡作用,会对椎弓根置入点和置入角度产生偏差,从而降低精确度。Ringel等研究中,试验组有7例中途转为开放手术,原因是机器人辅助钻孔在椎体外侧软组织和椎弓根缺乏足够的骨接触[5]。第四,学习曲线的影响。机器人辅助技术作为新技术应该考虑学习曲线,脊柱手术领域陡峭型的学习曲线表明,即便是经验丰富的脊柱外科医生仍然需要相当的时间提高手术操作熟练程度。第五,医生与机器人交互方式不同。按照医生参与手术操作程度,交互控制可划分为监督控制系统、远程手术系统、共享控制系统[12]。目前,大多数机器人辅助的脊柱手术为共享控制系统,其中人机协同参与的方式在提升机器人操作效率的同时也可能降低了精确度。
螺钉与关节面的距离是术后CT图像上反映出的椎弓根螺钉或者其头部与关节突关节面的最短距离,是衡量小关节置钉精确率的一种指标。该指标在本文涉及的2篇文献中作为衡量椎弓根置钉精确率的辅助指标。Meta分析结果表明,与常规徒手开放方法相比,机器人辅助增加了螺钉与关节面的距离。机器人对螺钉的参数设计(螺钉长度、直径、定位和轨迹)和操作的精细化程度可能是其原因,因为在这些方面机器人执行比医生徒手操作更具有可重复性和耐久性的优势。然而,Kim等[3]研究中2组螺钉的直径基线水平明显不一致(P<0.001),这导致较大异质性,采用SMD作为效应量消除了统计异质性,但临床异质性仍未消除。
多个回顾性和少量前瞻性研究发现手术机器人辅助能减少医源性血管和神经性损伤的产生[3,4,5,7,8,9,10,11]。但本研究显示,目前的证据尚不能证实机器人辅助比常规徒手开放方法有更低的并发症发生率和螺钉修复率。螺钉侵犯椎弓根水平以L3和L4椎体最常见[3,5],出现并发症和螺钉修复情况也以这两节段为主。多项研究发现,机器人辅助椎弓根内固定手术需要更长的手术时间[3,5,6,7,13],术中规划时间平均为24 min[3],而Roser等[6]发现这个过程需要(35.2±11.3)min。因为耗时较长,致使许多外科医生依赖于标准的开放方法,增加术中规划的步骤会延长整个手术时间,本研究也证实了这一点。其中,机器人辅助比常规徒手开放方法手术时间平均延长了20.9 min,与术中规划的时间长度相符。辐射暴露是确定的职业危害,主要防护方法是佩戴保护性的防辐射器具和缩短荧光透视的时间[14]。本研究显示,机器人辅助比常规徒手开放方法减少了辐射曝光时间,机器人辅助引导能够准确地再现规划路径,避免了常规徒手手术中无效的荧光透视,缩短了辐射曝光时间。
对于术后引流量,机器人辅助组明显少于常规徒手开放组[3,15],这是微创手术的优势。在Hyun等[4]的2个治疗组中,组间疼痛的术后VAS(visual analogue scale)评分差异无统计学意义,而机器人辅助组ODI(the oswestry disability)改善更显著(P=0.013),平均住院时间也比常规徒手组缩短了近3天(P=0.02)。Kim等[16]还开展了机器人辅助与常规徒手开放间的生物力学研究,分析融合手术前后近端相邻节段的椎间盘内压和小关节接触力的变化。结果表明,机器人辅助在应力增量减轻方面具有优势。
本研究所涉及的文献缺乏长期随访的临床结果,只有1篇文献报道了长期随访结果[5]。其16.3月的平均随访期表明,机器人辅助和常规徒手开放法的疗效和安全性无明显差异。此外,缺乏手术费用的相关数据,经济问题是患者考虑选择手术方式的重要原因,费用与疗效最优化的手术方案才能获得临床认可。另外,本研究纳入的文献数量较少,患者和置入螺钉数量不足,需要增加更高质量的随机对照试验提高统计效率。
与常规徒手开放手术方法相比,在目前的证据下,尚不能认为机器人辅助系统在椎弓根螺钉内固定的手术精确率、并发症发生率、螺钉修复率方面存在明显优势,并且会延长整体手术时间,增加了手术的风险,尽管可以降低辐射危害并提高小关节螺钉置钉的精度。综上,机器人辅助作为新技术应用于脊柱外科手术具有深入开发的潜能。
无

























