
核能是一种环保且能量巨大的新型清洁能源,其相关技术及应用在世界各地得到快速发展。核安全问题是安全利用核能过程中的一个十分重要的问题。辐射事故应急机器人作为核应急事故处理与救援中的重要工具,在帮助救援人员提前了解事故现场情况并做出科学决断具有十分重要的作用。该文阐述了近年来在辐射事故应急机器人方面的最新技术和成果,包括新型屏蔽材料、摄像元件的辐射防护、机器人通信、新型核应急机器人、机械臂的参数优化、核燃料组件破损泄漏监测机器人以及核应急处理机器人的快换装置等。


版权归中华医学会所有。
未经授权,不得转载、摘编本刊文章,不得使用本刊的版式设计。
除非特别声明,本刊刊出的所有文章不代表中华医学会和本刊编委会的观点。
随着清洁能源的建设以及在诸如三里岛核事故、切尔诺贝利核事故以及福岛核事故的发生后,各个国家均开始重视对核应急机器人的研发生产工作。尤其是在切尔诺贝利和福岛核事故中,人们认识到具有系统性的应急预案以及可靠的核电应急设备储备对核能的安全生产具有重要作用[1]。其中,在发生时间最晚的福岛核事故中,核应急机器人的作用得到了充分的展现,也暴露出了在应用核应急机器人时出现的一些曾经忽视的问题。近些年,在核应急机器人的辐射屏蔽与防护、机器人的摄像元件和机器人通讯等方面均诞生出了许多的新材料、新技术和新发明,也诞生出了许多新型的核应急机器人。
在核事故发生后,事故环境因为爆炸、核泄漏等问题将变得极为复杂,同时高辐射环境将对人体产生不可逆转的损害[2],但核事故处理需要救援人员提前了解核事故现场的具体情况,才能对复杂的情况制定出合适的处理方案,因此使用核应急机器人第一时间进入核事故现场就十分必要[3]。一般来说,根据核事故现场复杂环境的具体需要,要求机器人的设计一般需要兼顾到以下几个方面。
辐射事故应急机器人的主要控制部件包含集成电路、传感器、电池等辐射敏感结构,需要电离辐射屏蔽以降低射线带来的电路故障。这就对结构设计中辐射屏蔽、防尘性能、散热处理有特殊的要求。
在核事故中,机器人需要在高强度的辐射环境下进行不间断的工作,内部的传感器、电池等辐射敏感结构很容易发生损坏造成故障,加之现在所使用的特殊半导体材料制造工艺复杂且因市场需求较少导致成本较高,所以需要模块化的设计以方便在执行任务发生损坏时得以快速的修复[4],同时因为工作环境灰尘较大,模块化的设计也方便清灰处理。
核事故现场环境的多样性要求在设计机器人时考虑户内和户外、现场无线电覆盖情况等多种因素,例如在灾难核事故场景下,现场商业通讯信号等中断,需要LoRa无线传输替代基站通讯,同时对于地下和混凝土建筑内,应设计有光纤通讯备用模块,释放拖拽光纤进行通讯。
核事故发生后,机器人需要经常在空间狭小地段执行相关任务,所以要求机器人能够机动灵活,尺寸不宜过大。复杂地形时可以顺利翻越,具有良好的爬坡能力并可以搬运东西[4]。
核事故发生场地都有复杂的防辐射建筑构造,比如核电站内部各个平台之间以很陡的台阶相连接[1]。在核事故后,其地形环境因爆炸、高温等因素影响将变得更为复杂,同时可能需要机器人具有简单的清除障碍的能力。这也要求机器人需要具有灵活的运动性能,为保证机器人的安全,其速度不能过快,同时制动距离应当尽可能的小。
核事故发生后,需尽快获取现场信息,这包括辐射剂量、现场照片、温度等。为方便救援人员快速采集到第一手的事故现场资料,机载多个相机方便采集现场资料以方便救援人员第一时间制定救援计划,机载辐射探头等传感器能够第一时间传输反馈现场环境辐射剂量、温度湿度等,为救援提供参考。
在福岛核事故中,核应急机器人在诸多的活动受限区域采集事故资料,为事故救援方案的制定做出了突出的贡献,但是,受限于环境等因素的影响,许多核应急机器人都出现了各种各样的问题,至少已经有8个机器人因为种种原因而不得不停止相关作业工作。其中,3个机器人是因为空间障碍物的阻挡而失效(Quince1、Warrior、ShapeShifting-1),3个机器人可能因为辐射造成损伤而出现故障(Shape Shifting-2、TOKYO(AP)、Scorpion),另外2个机器人故障原因未知(T-Hawk、Survey Runner)[5]。这告诉我们核应急机器人的体积应尽可能地小巧,同时拥有良好的避障和活动能力;核应急机器人的抗辐射能力一定要强,同时也要便于维修。强烈的地震引发海啸是造成福岛核事故的原因之一[6],许多地段可能存在大量的积水[7],因此新的核应急机器人也应充分考虑到防水问题,防止因积水问题影响核应急机器人的活动从而影响机器人工作。
核事故现场存在严重的辐射,为了保证核应急机器人在核事故现场能够正常运行,机器人的设计需要考虑辐射屏蔽以及使用耐辐射器件。一般来说,在核应急机器人中,受辐射影响较大的器件主要为电子器件、传感器、信号通讯系统、光纤、润滑剂、黏合剂、密封剂、绝缘材料等部分[8]。目前核防护主要有三种方法:屏蔽加固防护、电路抗辐射加固和采用新型材料防护[9]。常用的热中子吸收材料有含硼聚乙烯、含硼不锈钢、硼铝合金、Al/B4C陶瓷和复合材料等[10]。铅屏蔽等低成本屏蔽方式也有广泛的应用,但需要考虑所使用材料的力学性能、热物理性能、热稳定性、抗热震性等诸多因素[10]。同时也需考虑材料密度等因素以保证机器人在达到所需要的防辐射能力时仍具有灵活的运动能力。
在太空中,电子器件的防辐射问题也是一个较为棘手的问题,所以我们可以参考在太空环境中电子器件的辐射屏蔽与耐辐射器件。目前的技术主要是通过机械化学合金化和将不同的粉末均匀混合后进行热挤压或热压烧结来合成防辐射材料。Khasanov等[11]则发明了一种可用于电子设备辐射屏蔽的金属-陶瓷纳米复合材料,这种材料包括77.9vli%的AMg6,18.8voi%的B4C和3.3voi%的W,使用SPS方法在490 ℃和40 MPa的压力下达到了3.13 g/cm3的密度,使其拥有了更好的防辐射性能。
为低成本解决辐射屏蔽并兼顾散热问题,作者刘强等设计了多层通道散热通道构造,通过气流的弯曲流通通道,避免了射线通过通孔进入和破坏电子器件,使得结构和器件成本降低。
核应急机器人最重要的用途之一就是需要将核事故现场的一手资料返回给救援人员,现场的画面作为最直观的资料对事故救援有着极高的价值,同时机器人在行动时也需要视觉系统作为行动的辅助,这就要求核应急机器人应当拥有符合任务需要的摄像元件。根据将光信号转换为电信号采用的器件的不同,摄像元件可分为电荷耦合元件(charge coupled device,CCD)和互补性氧化金属半导体(complementary metal-oxide semiconductor,CMOS)两种类型[12]。核事故现场由于其强辐射的环境,很容易对摄像元件造成干扰,轻则影响成像质量,重则损坏摄像元件[13]。对这个问题的解决方法有两个方向:使用抗辐射的成像设备或对成像设备进行辐射保护[14]。在摄像元件的设计上,许多国内外的设计均利用了γ射线无法反射或折射的性质,通过对光的反射γ或折射达到抗辐射的目的[14,15]。寇婕婷等[14]发明了一种抗辐射与防辐射相结合的潜望镜式光路结构,通过一组反射镜来防止光学系统受到辐射的影响,抗辐射镜头有四个抗辐射镜片,成像镜头经抗辐射光纤传像束与CCD相机相连,起到了保护作用。同样的,应用在航空航天中的器件同样可以在核应急机器人方面给予我们一些启发。Lin和Chen[15]制作了一个具有紧凑性和高可靠性的图像传感器,其采用了CMOS器件,并在所有透镜元件中加入了抗辐射光学玻璃材料,保护了图像传感器。
导航的发展也离不开GPS和机器视觉测绘。因为核事故现场环境复杂,存在许多障碍,同时辐射很强,无论是对机器人进行有线连接还是无线连接均存在一定的困难和较强的干扰。所以依赖于机器视觉等技术的机器人导航也是核应急机器人的实际需求之一。
作者刘强等在使用了一种平板阵列探头结合图像采集摄像头,测试了一种通过射线强度辅助搜索放射源的方法,在核事故视觉导航中具有一定的应用价值。核应急机器人的导航可以使核应急机器人在核事故环境中更好的避障和运动,自动绘图也可以使救援人员能够第一时间了解事故现场的环境。
核事故发生后,救援人员需要控制机器人在核事故现场采集资料,但由于核事故现场具有很强的辐射,所以机器人的包括回传数据和远程操作在内的通讯问题也是亟待解决的问题之一。机器人的通讯可以分为有线通讯和无线通讯两种[16],有线通讯的稳定性更好,但会受限于环境而影响机器人的灵活性。就核事故环境的复杂性而言,无线通讯方式能够让机器人拥有更加灵活的运动方式。就有线通讯而言,寇婕婷等[14]发明的抗辐射与防辐射相结合的潜望镜式光路结构中就有将成像镜头通过抗辐射光纤传像束与CCD相机相连来传输数据。此外,Huo等[17]也研究出了一种电磁脉冲保护用屏蔽电缆的非端点接地方法,使用这种方法,电缆的接地位置会根据电缆保护套上的电流分布而改变。仿真结果表明其在最佳接地位置时耦合电磁能量可降低92%。Zhang和Meng[18]发明了一种新的电缆,这种电缆的屏蔽层是一种复合结构,最外层是一层抗辐射材料,逐渐往内分别是铅编织层、PET、铜编织层和铝箔、PTFCE和C2F3Cl、由炭黑填充的聚乙烯,内部核心为铜芯,该设计的电缆的耦合响应远小于普通电缆。
无线通讯一般都会存在所需功耗和传输范围相矛盾的问题,一般传输范围大则需要的功耗较大,功耗小则传输的范围也小。核应急机器人需要更小的功耗和更大的传输范围才能适应勘察核事故现场的需要,LoRa标准可以做到在更小的功耗上得到更广的传输范围[19]。它相比传统的无线射频通信方式,在相同功耗下可传输范围扩大了3~5倍[20]。Manzano等[21]研制出了一种用于环境辐射监测的物联网LoRaWAN网络。其终端设备由一个高灵敏度的紧凑型γ辐射传感器构成,带有定制设计的软硬件以用于LoRa传输。此外,Chen等[22]发明了一种核污染处理机器人,它采用无线控制的方式,基于TCP/IP协议和客户机-服务器模式,采用Winsock技术构建远程主机和移动机器人。作者刘强等为了满足不同场景辐射事故救援,设计了一种LoRa无线通讯和卷轴光纤双通讯模块,可拆卸组装的多场景应用通讯模式,且在LoRa无线通讯的图像传输通讯中,采用了高压缩率低帧数合成影像,解决了LoRa传输波特率对影像传输的限制。
核应急机器人可以分为3种,分别为履带式机器人、轮式机器人和浮游式机器人[1]。在履带式机器人方面,张志义等[1]研制出了一种采用单摆臂履带技术的机器人,与普通的主履带式移动机器人相比,他的摆臂可以更好地适应恶劣的地形环境,增加了机器人的活动性能。但是对于阶梯高度或深度较大的楼梯,单摆臂履带机器人仍然无法胜任,因此他们又研发出了采用双摆臂履带技术的第2代机器人,其可有效提高机器人的运动性能,搭载了两自由度云台、五自由度操作机械臂和辐射探测器,拥有有线、无线两种通讯方式,无线通讯方式可有效避免在福岛核事故中如Quince1机器人因通讯电缆被管道钩住而导致的不能继续工作的问题。对于轮式机器人的研发,他们设计开发了一种小型轮式应急机器人,共有两种不同的型号,由控制终端、电缆盘、摄像头、爬行器和辐射检测探头五部分组成。整机全防水,可适应恶劣环境,携带有升降式云台摄像头和后置摄像头组件,同时也可将摄像头换成小型机械手以实现抓取采样等操作。在浮游式机器人方面,他们研发出了具有不同尺寸和用途的鳐龙系列浮游式机器人,可以用于核设施的水下环境以及回路系统内部等水下环境进行探测和处置工作。以上几种机器人均通过了实际的性能测试,具有良好的性能[1]。
除了研制机器人外,对现有机器人的结构进行优化也是当今核应急机器人研制的方向之一。高伟亚等[23]对核环境下探测机器人的机械臂进行了结构分析并对其进行了优化。他们通过对机械臂关节的特性进行动力学分析,确定了优化目标,使用相关软件进行了分析并设计了优化实验,优化选取了合适的相关设计参数,优化了机械臂设计,使两个臂体质量分别减少了28.3%和25.9%,机械臂末端负载提高了10%,改善了机械臂关节力矩。
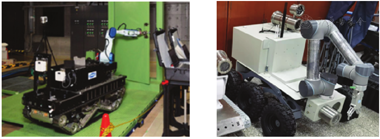
国内的核燃料组件包壳完整性的检测技术目前仍然不够成熟,廖昌斌等[24]因此进行了核燃料组件破损泄露监测机器人的研究,他们开发的系统采用了双啜吸筒交替检测和燃料组件剥壳破损定量分析等技术,其安全性良好,具有良好的经济效益,同时检测效率很高。作者刘强等人在医用核事故检测技术中,对远程控制、自主引导、散热屏蔽等技术上引入新的计算机技术,拟实现更高效的现场勘测和测量任务,图1为刘强团队研制的"开拓号"辐射机器车(右)与日本楢叶町技术开发中心研发新一代抗辐射机器人(左)对比图。
为提高核应急机器人的作业范围和作业效率,可以为机器人准备多种工具,在执行任务的时候实现快速换接,从而适应多种作业环境和作业任务。王伟和唐德文[25]研制的核应急处理机器人快换装置就能解决这个问题,这个装置解决了快换装置在应急处理时远程对接困难的问题,其结构包括快换装置壳体、电磁锁、液压马达、卡块、液压胶管街头、支撑架、转盘、齿轮、连接耳、滑块、连杆、轴和齿轮。通过远程控制液压缸、电磁锁等部件完成对工具头的换装和拆卸工作。
经过了诸如三里岛核事故、切尔诺贝利核事故以及最近的福岛核事故,核应急机器人的作用和重要性越发的凸显了出来。各国科学家也将核应急机器人作为研究的重要方向之一。核应急机器人的设计需要考虑诸多因素,其中最主要的就是模块化的设计、对包括γ射线的辐射防护以及保证机器人的灵活性。就对辐射的防护而言,目前主要采用新型材料屏蔽辐射与使用耐辐射器件两种思路,含硼的新型材料如Al/B4C陶瓷经常用于辐射的防护。同时核事故现场环境错综复杂,核应急机器人的设计也应当考虑机器人的视觉与导航情况。对机器人成像设备的防护一般也都会利用γ射线只能穿透无法反射或折射的性质,通过对光线进行反射等操作加之以防辐射镜片以保护CCD等电子器件免受辐射干扰。对机器人的连接可以通过有线和无线两种方式,有线方式需要考虑对辐射的屏蔽问题,无线方式需要考虑通讯时不应需要过大的功耗,可以采用诸如LoRa标准等进行通信。近几年出现了许多新的核应急机器人及其相关的技术成果:如张志义等[1]研制的携带有摆臂的履带式机器人、小型轮式应急机器人以及鳐龙系列浮游式机器人,还有高伟亚等[23]对探测机器人的机械臂的优化,廖昌彬等[24]的对核燃料组件破损泄露监测机器人的研究,以及由王伟等[25]研制的核应急机器人快换装置。作者刘强等实验室团队近年来在辐射事故救援机器人方案中,引入图像人工智能导航等技术,拟解决通讯中断情况下的自主引导和动作。相信在不久的将来也会出现越来越多的核应急机器人的新技术及新产品。
所有作者均声明不存在利益冲突

























