
探讨机器人辅助下膝关节单髁置换术(UKA)能否提高手术的精准性,以及其安全性和短期疗效。
对2016年9—12月在上海交通大学附属第六人民医院和解放军总医院骨科关节外科接受机器人辅助下UKA治疗的20例患者临床资料进行回顾性分析。术前诊断均为膝关节骨关节炎,每家医院各10例患者;男3例,女17例;年龄51~79岁,平均65岁;BMI(26.9±3.4) kg/m2。均采用MAKO RIO机器人手术系统和RESTORIS MCK单髁膝关节假体(STRYKER MAKO Surgical,美国)进行手术,其中有5例患者同时接受双侧UKA。记录手术时间及出血量、术后疼痛情况,测量术前及术后下肢力线、术后胫骨假体植入角度,术前和术后进行膝关节功能评分。
单侧UKA手术术中止血带使用时间平均为(27±10) min。15例单侧单髁置换患者术后第2天时总失血量平均为(476±290)mL,无一例患者需要接受输血治疗。术后8、16和24 h VAS评分平均分别为(3.2±1.2)分、(1.8±0.8)分和(1.1±0.3)分。20例(25膝)患者均获得随访,随访时间为8~20周,平均14.1周。末次随访时,患侧膝关节的美国膝关节协会评分临床评分由术前的(57±13)分提高至(90±6)分,功能评分由术前的(48±18)分提高至(79±12)分,差异均有统计学意义(t=14.941、10.014,P值均<0.01);胫骨假体冠状位的植入角度为内翻0°~3.9°,平均1.7°±1.2°,与术前计划的目标角度(内翻1°)偏差0°~3°,平均为1.1°±0.9°。2家医院两组病例胫骨假体冠状位角度与目标位置的偏差分别为1.2°±1.1°和1.0°±0.6°,差异无统计学意义(t=0.421, P>0.05)。随访期间所有病例均未观察到手术部位感染、深静脉血栓形成以及血管神经损伤等手术相关的并发症。
机器人辅助下UKA能够实现微创条件下的精准手术,并具有优异的安全性;其远期临床效果及对膝关节功能改善的作用,尚需进一步的对照研究和长期随访加以证实。


版权归中华医学会所有。
未经授权,不得转载、摘编本刊文章,不得使用本刊的版式设计。
除非特别声明,本刊刊出的所有文章不代表中华医学会和本刊编委会的观点。
膝关节单髁置换术(unicompartmental knee arthroplasty, UKA)是治疗膝关节骨关节炎的有效方法。与全膝关节置换(total knee arthroplasty, TKA)相比,UKA手术创伤小、失血量少,术后膝关节功能恢复、本体感觉与步态更好,术后康复更快[1,2,3,4]。但是,采用传统技术和工具进行UKA,患者术后力线不良和假体位置不良的发生率高[5,6],假体翻修率高于TKA[7],导致其推广应用受到一定程度地限制。在患者和假体选择恰当的前提下,截骨和假体植入的精确性以及由此带来的软组织平衡问题,可能是影响假体远期生存率和关节功能的决定因素[8,9]。
机器人技术在外科领域的应用为手术精确性的提高带来了巨大的帮助[10]。为了提高UKA的手术治疗效果和假体生存率,需要对术中假体位置和软组织平衡等进行更加精确和可靠地控制,故机器人辅助手术系统近年来被应用于UKA。这些系统按照工作原理的不同可以被分为主动式、半主动式和被动式系统,其中以半主动式系统应用最为广泛和成熟[10]。MAKO RIO机械臂辅助交互式骨科手术系统(STRYKER MAKO Surgical,美国)属于半主动式机器人辅助手术系统,目前在机器人辅助人工关节置换领域具有技术领先优势。该系统应用患者术前的CT影像资料生成术前计划;在手术过程中,手术医生按照术前计划操纵机械臂,在实时触觉反馈的引导下利用机械臂尖端的高速磨钻精准完成截骨操作,为假体的精确植入提供保障;同时,术中还能够根据软组织张力的量化评估结果对术前计划进行微调,实现屈伸活动全程内最佳的软组织平衡。文献报道,MAKO RIO机器人辅助下UKA术后股骨假体和胫骨假体的位置处于目标位置2°以内的比例,显著高于利用传统工具手术者[11,12],而且在术中能够精准实现术前计划制定的各个屈伸角度的软组织平衡状态[13]。
MAKO RIO系统在国外应用的历史已经超过10年,但是其在国内的应用尚处于刚刚起步阶段。为了评价RESTORIS MCK单髁膝关节假体(STRYKER MAKO Surgical,美国)配合MAKO RIO机器人手术系统用于国人UKA的安全性和有效性,并为RESTORIS MCK单髁假体在国内注册提供有效数据,笔者所在的2家医院从2016年9月开始率先在国内开展MAKO RIO机器人辅助下UKA的探索性研究,初步临床结果满意,报道如下。
对2016年9—12月在上海交通大学附属第六人民医院和解放军总医院骨科关节外科接受机器人辅助下UKA治疗的20位患者临床资料进行回顾性分析。纳入标准:(1)膝关节内侧间室骨性关节炎,引起疼痛或产生功能障碍且经规范保守治疗无效;(2)年龄40~80岁;(3)BMI≤35 kg/m2;(4)术侧膝关节既往未接受过手术治疗;(5)膝关节内翻畸形≤15°且固定性屈曲挛缩畸形≤15°;(6)膝关节前交叉韧带功能状态良好;(7)无全身或局部感染征象。本项研究的手术方案经过2家医院各自伦理委员会审批通过,所有患者对手术知情同意。
20例患者术前诊断均为膝关节骨关节炎,每家医院各10例患者,其中有5例患者同时接受双侧UKA;男3例,女17例;年龄51~79岁,平均65岁;BMI(26.9±3.4) kg/m2。均采用MAKO RIO机器人手术系统和RESTORIS MCK单髁膝关节假体(STRYKER MAKO Surgical,美国)。
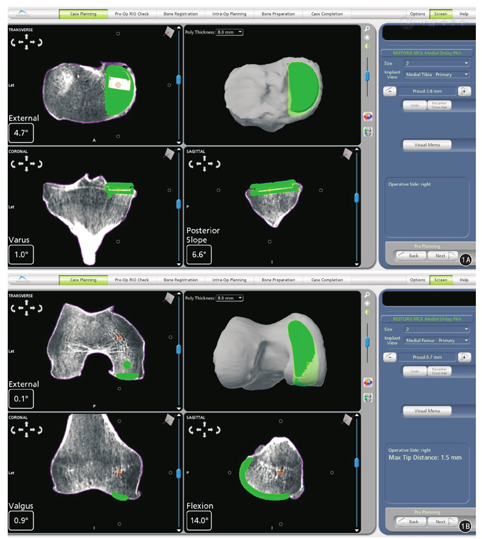
患者术前根据MAKO RIO系统对CT扫描数据的层厚和窗宽等要求常规行患侧髋、膝、踝3个部位的CT扫描,利用MAKO RIO系统自带的术前计划软件将CT扫描数据重建膝关节3D图像模型。手术医生根据此模型进行术前计划,以最佳的假体覆盖、重建患者膝关节解剖形态特点和最小截骨量作为术前计划的目标,初步确定单髁假体的植入位置和角度以及假体的型号大小(图1)。
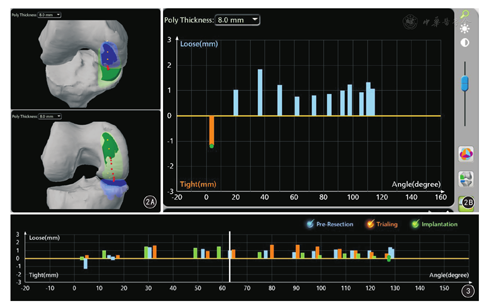
手术分别在2家医院各由一组经过培训的医生负责实施。患者全身麻醉,仰卧位。取膝前内侧纵切口,经髌旁内侧进入膝关节;观察外侧胫股关节及髌股关节磨损病变情况,检测前交叉韧带功能良好。确认可以进行UKA手术之后,在股骨髁内侧及胫骨平台前方近胫骨结节处各安装一个金属检测针(checkpoint)。在胫骨侧距离胫骨结节4横指的位置打入2枚固定针,安装胫骨侧示踪器;在股骨侧距离髌骨上极4横指处打入2枚固定针,安装股骨侧示踪器。在系统中完成髋关节旋转中心、踝关节中心、股骨髁、胫骨近端的注册,活动膝关节记录运动学参数和肢体机械力学参数。去除膝关节内侧的骨赘后,在施加适当外翻应力的状态下,自伸直位开始活动膝关节,每间隔15°~30°由系统记录各项运动学及力学参数,得到初始的关节间隙数据;微调术前计划中的假体位置,使得虚拟的内侧关节间隙在各个屈伸角度均维持在1~2 mm,假体的虚拟接触轨迹理想(图2),并确认最终的手术计划。
术者操纵机器人机械臂,按照术前计划限定的范围,在触觉反馈机制的引导下用高速磨钻进行股骨侧及胫骨侧截骨,取出残留的软骨碎屑及后方骨赘。安装试模,在导航系统引导下确认假体位置及运动学参数满意。随后取出试模,抬高患肢,大腿近端充气式止血带充气止血,在关节周围行"鸡尾酒"注射以利于术后镇痛,用脉冲冲洗枪冲洗创面。干燥骨面,以骨水泥安装RESTORIS MCK单髁假体;待骨水泥固化后再次在膝关节外翻应力状态下评估软组织平衡情况,并与术前计划进行对比(图3)。常规不放置引流管,逐层关闭手术切口。
术后8 h开始给予低分子肝素皮下注射预防深静脉血栓形成,24 h内常规给予预防性抗生素治疗;并根据患者的恢复情况嘱其开始进行下地负重行走锻炼,以及非负重状态下的主动和被动膝关节屈伸活动锻炼。术后8、16和24 h对膝关节进行VAS评分。术后第2天复查血常规,并根据Gross等[14]提出的公式计算术后第2天时的总失血量,具体公式如下:
总失血量(mL)=血容量(mL)×(Hct术前-Hct术后)/Hct平均
其中,Hct术前、Hct术后为患者术前和术后第2天血细胞比容,Hct平均为Hct术前和Hct术后的平均值。患者血容量则根据Nadler等[15]提出的公式进行估算,具体公式如下,
血容量(mL)=k1×身高(cm)+k2×体质量(kg)+k3
其中,男性患者k1=0.366 9,k2=0.032 19,k3=0.604 1;女性患者k1=0.356 1,k2=0.033 08,k3=0.183 3。
20例患者术前均进行美国膝关节协会评分(Knee Society Scores, KSS)作为基线值。末次随访时进行患侧膝关节KSS评分。观察有无手术部位感染、深静脉血栓形成、血管神经损伤等并发症。
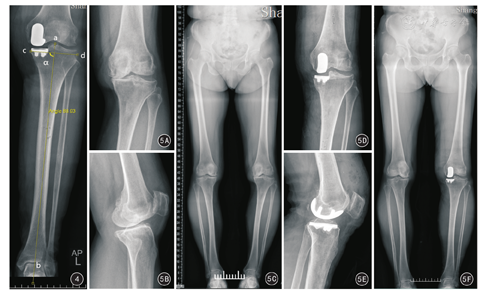
所有患者在术前常规进行标准双下肢正位全长X线检查,以此来测量患侧膝关节的内外翻畸形角度。术后5 d内拍摄双下肢正位全长X线片和患侧膝关节正侧位X线片,测量术后患侧膝关节畸形角度,并测量冠状面上假体内外向轴线与胫骨机械轴的夹角(图4),与术前计划的假体位置目标值(内翻1°)进行比较,评估冠状位上胫骨假体的植入位置以及手术方案实施的精确性。X线片影像学角度测量利用计算机软件(金仕达卫宁PACS系统,金仕达卫宁软件股份有限公司)由2位未参与手术的医生分别独立手动完成,以2位测量者所测数值的平均值作为最终测量结果。股骨头中心与膝关节中心的连线定义为股骨机械轴,膝关节中心与踝关节中心的连线定义为胫骨机械轴,股骨机械轴与胫骨机械轴的夹角定义为膝关节畸形角度。
应用SPSS 17.0统计软件对数据资料进行统计分析。服从正态分布的计量资料以 ±s表示,且两组间方差齐采用独立样本t检验;患者手术前后KSS临床和功能评分差值服从正态分布,采用配对样本t检验。以P<0.05为差异有统计学意义。
±s表示,且两组间方差齐采用独立样本t检验;患者手术前后KSS临床和功能评分差值服从正态分布,采用配对样本t检验。以P<0.05为差异有统计学意义。
20例患者手术过程均顺利,其中15例单侧UKA手术时间(155±22)min,术中止血带使用时间平均为(27±10) min。术后8、16和24 h VAS评分平均分别为(3.2±1.2)分、(1.8±0.8)分和(1.1±0.3)分。在接受单侧单髁置换的15例患者中,术后第2天总失血量平均为(476±290)mL,无一例患者需要接受输血治疗。
截至2017年1月30日,20例患者随访时间为8~20周,平均14.1周。本组5例患者接受一期双侧UKA,故共有25膝接受膝关节功能评分及术前术后影像学测量分析。末次随访时:患侧膝关节的KSS临床评分由术前的(57±13)分提高至(90±6)分,功能评分由术前的(48±18)分提高至(79±12),差异均有统计学意义(t=14.94、10.014,P值均<0.01)。20例患者影像学结果评估满意(图5),膝关节内翻畸形角度由术前的8.7°±4.2°纠正至术后的4.0°±3.5°。25膝UKA中,胫骨假体内外向轴线与胫骨机械轴的夹角为内翻0~3.9°,平均内翻1.7°±1.2°,其中内翻0~1.0° 10膝,>1.0°~2.0° 6膝,>2.0°~3.0° 5膝,>3.0°~3.9° 4膝,胫骨假体位置处于内翻3°以内占84%(21/25),无一例出现假体外翻。相对于术前计划设定的1°内翻的目标值,术后胫骨假体冠状位角度偏差平均偏差角度为1.1°±0.9°,其中21膝(84%)<2°,4膝(16%)偏差2°~<3°。2家医院2组病例胫骨假体冠状位角度与目标位置的偏差分别为1.2°±1.1°(n=10)和1.0°±0.6°(n=15),差异无统计学意义(t=0.421,P>0.05)。
随访期间所有病例均未观察到手术部位感染、深静脉血栓形成以及血管神经损伤等手术相关的并发症。
在需要接受膝关节置换手术的患者中,病变局限于单一间室的患者占10%~25%[16],UKA可以使这部分患者获得优异的临床结果[17,18,19];但是,影响UKA手术效果的因素很多,其中与假体远期生存率密切相关的就是假体植入位置、下肢力线以及软组织平衡,这些因素可以通过改进手术技术而得到控制。机器人辅助下的UKA是近年来应用于UKA手术中的新技术,目的是提高手术的精准性和可重复性,改善手术治疗效果,并提高假体的远期生存率。Coon等[20]进行的一项多中心临床研究,对接受机器人辅助UKA的854例患者进行了最短2年的随访,结果显示患者的满意率高达92%,假体的2年生存率为98.9%,均优于传统UKA。2016年9月,笔者在国内率先开展了此项技术。初步临床经验显示,机器人辅助下UKA能够实现微创下精准截骨与假体植入:微创体现在术中平均27 min的止血带使用时间、较少的总失血量以及术后较低的VAS评分;精准体现在术后测量结果中所有病例胫骨假体冠状位位置相对于目标位置的偏差均在3°以内,以及由良好的软组织平衡带来的术后膝关节功能的显著改善。
UKA由于大多采用微创入路进行,术中显露范围有限,加上传统手术工具需要医生进行较多的主观判断,使得术中精确对线和精准安装假体变得较为困难[21]。假体位置不良或力线不佳会导致UKA术后膝关节功能欠佳、聚乙烯过早磨损以及过高的翻修率[5,21]。Gulati等[22]研究认为,尽管采用活动平台和球形股骨髁设计的牛津单髁的胫骨假体,发生5°以内的对位不良不会显著影响临床结果,但是对于采用固定平台设计单髁假体来说,同等程度的对位不良会造成过高的边缘负荷和过快磨损。因此,如何提高假体安装的精确性就成为影响单髁假体生存率和手术治疗效果的重要决定因素。采用术后CT扫描数据进行测量的几项临床研究显示,机器人辅助下UKA术后的胫骨假体冠状位角度与目标位置的偏差能够控制在1.5°~2.5°[11,23,24]。本研究的初步临床结果显示,术后胫骨假体冠状位角度与目标位置平均偏差为1.1°±0.9°,与文献[11]报道相似。由于术前计划时对CT扫描图像的手动处理过程可能存在微小误差,或者术中可能出现示踪器的微小移动,最终的实际假体安装角度可能存在1°~2°的误差[11]。为了避免出现胫骨假体外翻放置而带来的外侧间室压力增高的问题,笔者在术前计划中设置胫骨假体冠状位的目标位置为内翻1°。
在假体精准安装的基础上,对软组织张力的合理控制是决定术后下肢力线以及膝关节功能状态的最重要因素。Vasso等[25]在对125例UKA病例平均随访7.6年的一项研究结果中发现,UKA术后下肢力线维持在7°以内的轻度内翻状态有利于术后膝关节的功能。本组患者术后膝关节内翻角度平均为4.0°±3.5°,未出现术后膝关节外翻病例,与机器人系统对软组织张力的精确评估功能密不可分。术者在手术过程中通过对术前计划的精细微调,能够精准地控制内侧间室的间隙,使其在屈伸活动全程均保持在1~2 mm的理想范围内,股骨假体和胫骨假体的接触轨迹始终处于较为理想的状态;同时,借助于机器人系统的实时导航功能,术者能够全程监控下肢力线,避免出现内外侧过紧和膝关节外翻。此外,为了避免股骨侧假体近端部分突出于软骨表面而影响髌骨滑动,术中对于股骨假体前方的软骨轮廓的描绘(cartilage mapping)也是术中非常重要的步骤,需要术者加以重视。
传统手术技术下的UKA对手术技术要求较高,需要一定的学习曲线。Badawy等[26]分析了挪威关节登记中心4 460例第三代牛津单髁假体(Biomet,英国)的随访结果,发现假体生存率与医院的年均UKA手术量显著相关,有近半数的医院每年单髁置换例数少于10例,他们的翻修率显著高于年手术量40例以上的医院;具体分析翻修的原因,发现低手术量医院的病例中出现不稳定、脱位、骨折、对位对线不良等技术性错误的概率(16%~21%)显著高于高手术量医院(7.7%)。Baker等[27]通过对英格兰和威尔士关节登记中心数据的分析,也得出同样的结论,即医院和医生的手术量影响牛津单髁假体的翻修率,建议医生的单髁手术量需要达到至少每年13例以上,或者将患者转诊给大手术量的医生来进行手术。
机器人辅助下单髁置换手术作为一项新技术,不可避免的存在所有新技术都需要面对的学习曲线的问题,而学习曲线阶段可能会带来手术并发症的发生率增高的问题。Coon等[28]报道了他们使用MAKO机器人进行UKA的最初36例病例的临床结果,与他们之前进行的45例传统技术UKA相比,两组患者在膝关节功能上差异无统计学意义,证明该项新技术在开展初期即可取得与以往成熟技术相当的临床结果,不存在明显的学习曲线所带来的效果不良或并发症增加的问题。本组20例中,15例行手术机器人辅助下单侧UKA的平均手术时间为(155±22)min,相对于笔者进行传统UKA手术60~90 min的手术时间明显延长,与使用初期对于系统的熟练程度不够有关,尤其是在术中通过微调术前计划来获得满意的软组织平衡这一过程耗时较多。随着使用经验的积累,相信手术时间可以逐步缩短。虽然手术机器人辅助下UKA的总手术时间有所延长,但是除使用骨水泥安装假体之外的大部分操作过程均不需要使用止血带。本组病例的止血带使用时间平均为(27±10) min,从而减少了由于长时间使用止血带而造成的软组织损伤和术后疼痛。更重要的是,本组病例虽然是2家医院使用机器人辅助下行UKA的最初20例病例,但所有病例的胫骨假体冠状位角度与目标位置偏离均在3°以内,而且2家医院的病例组间在安装角度上无显著性差异,充分证明了这一技术的可靠性,可在很大程度上减少手术医生的经验对手术结果的影响。
本研究也存在一些不足之处。首先,采用的测量方法是根据X线平片来进行的,尽管采用2位医生独立测量的方法来减少主观误差,但拍片的角度是否正确仍将影响假体安装角度的测量结果;同时,由于股骨髁假体的形态是立体的解剖形态,单纯凭X线平片无法对股骨假体的位置进行准确评估。其次,我们的随访时间尚短,加之未设立对照组,难以评估假体植入的精确性是否能够带来功能结果的改善,今后对此将进一步研究论证。机器人辅助下单髁置换术能够在微创条件下实现精准截骨、精确的软组织平衡和假体植入,并且具有优异的安全性,不会带来学习曲线阶段并发症的增多。其远期临床效果,尤其是精准手术是否能带来膝关节功能的相应改善,还需要进一步的对照研究和长期随访研究。

























